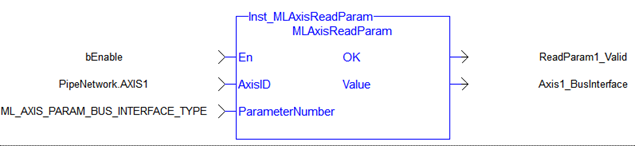
MLAxisReadParam
![]() This function/function block was added in KAS v4.02.
This function/function block was added in KAS v4.02.
 Function Block - Returns the value of the specified axis parameter.
Function Block - Returns the value of the specified axis parameter.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
AxisID |
DINT |
No range |
N/A |
No default |
ID Name of the Axis block. |
|
ParameterNumber |
INT |
Enumerated |
N/A |
No default |
See Axis Parameters. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
OK |
BOOL |
FALSE, TRUE |
N/A |
Indicates whether this function block has completed without error. |
|
Value |
LREAL |
No range |
N/A |
Value of the axis parameter. |
Remarks
None
Axis Parameters
|
ID |
Parameter |
Name |
R/W |
Update Rate Type |
Description |
|---|---|---|---|---|---|
|
ML_AXIS_PARAM_BUS_INTERFACE_TYPE |
Bus Interface Type |
Read-only |
The parameter value is:
|
||
|
ML_AXIS_PARAM_BUS_POSITION_DEMAND |
Position demand value |
Read-only |
Drive Position Demand Value 32-bits.
|
||
|
ML_AXIS_PARAM_BUS_STATUS_WORD |
Drive Status Word |
Read-only |
Drive Axis Status Word 16-bits.
|
||
|
ML_AXIS_PARAM_BUS_CONTROL_WORD |
Drive Control Word |
Read-only |
Drive Axis Control Word 16-bits.
|
FBD Language Example
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* Check if Pipe axis is associated with an EtherCAT device or simulated *)
Inst_MLAxisReadParam(PipeNetwork.AXIS1, ML_AXIS_PARAM_BUS_INTERFACE_TYPE);
IF Inst_MLAxisReadParam.OK THEN
Axis1_Simulated := Inst_MLAxisReadParam.Value = DRIVE_BUS_INTERFACE_SIMULATOR;
END_IF;
See Also






