|
Name |
Description |
|
Connects a sampler block to the specified CoE object in a PDO. |
|
|
Connects a sampler block to a pipe network axis or pipe block. |
|
|
Connects a sampler block to a specific PLCopen axis variable. |
|
|
Connects a sampler block to a specific Pipe Network axis variable. |
|
|
Initializes a sampler object. |
-
-
There is a delay when using an external encoder.
The delay is five cycles:
2 cycles to read the encoder from the AKD via EtherCAT,
1 cycle for computing,
2 cycles for sending the new position set point to the AKD).
This lag error is speed proportional (5 cycles * speed).
A Phaser block can be used to compensate for this lag.
Purpose
The sampler block is used to periodically sample and place into a pipe some output of a source object. (Figure 1)
Example: The sampled output might be the POSITION or SPEED of the source object measured by a resolver, an encoder, or some other types of sensor.
- The sampler implements a logical connection between an external master (source object outside the KAS system) and one or more pipes.
- This is for slaving the motion of the KAS system to the external master by placing the sampled values into the pipes.
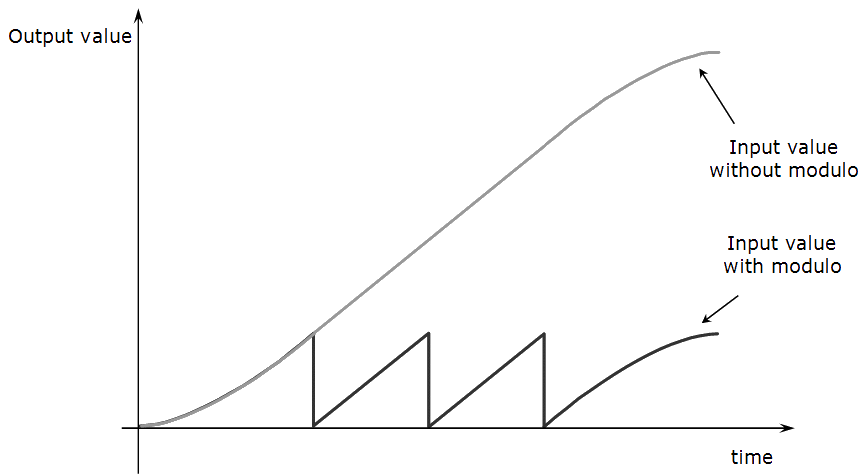
Figure 1: Example: Sampler Parameters
Figure 2 illustrates the concept.
The Sampler feeds motion trajectory data derived from an encoder (or resolver) coupled to the remote machine into the Pipe Network.
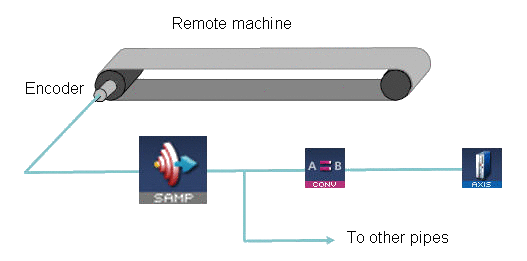
Figure 2: Example: Sampler Pipe Block Used to Track an External Master
Parameters
|
Parameter |
Range |
Unit |
Description |
|---|---|---|---|
|
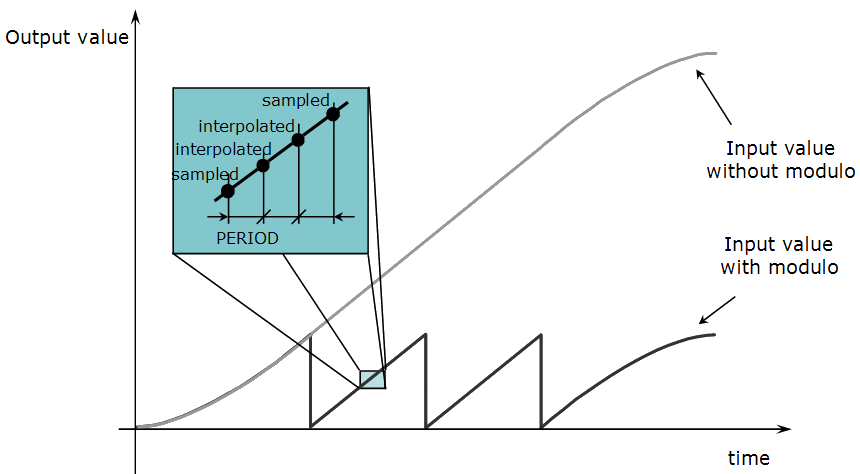
SamplingPeriod |
0.25 to 31,557,600,000.0 |
Millisecond |
Period that the device is sampled, expressed in milliseconds.
Figure 3: Example: Sampler Period |
|
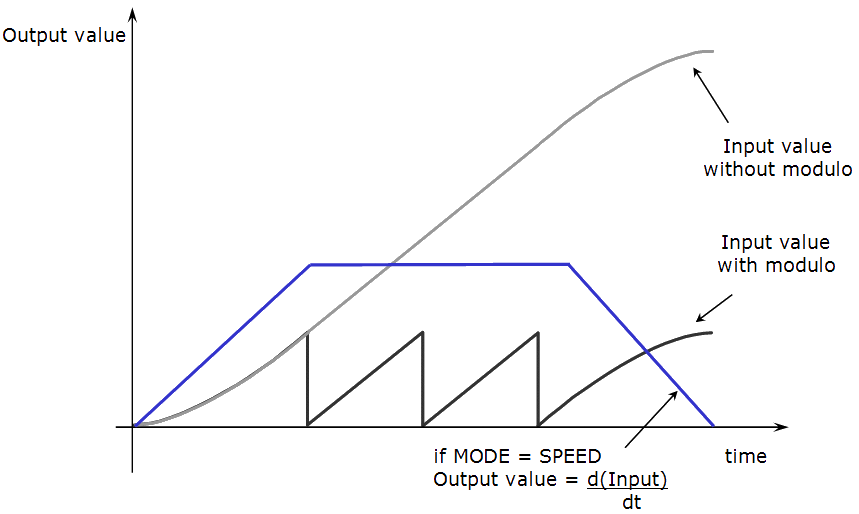
Mode |
See Description. |
N/A |
Sampled output can be either Position or Speed.
Figure 4: Sampler Mode Position
Figure 5: Sampler Mode Speed |
|
InputModuloPosition |
0 to 1.0x10300 |
User units |
Period of the input signal.
|
|
OutputModuloPosition |
0 to 1.0x10300 |
User units |
Period of the output signal.
|

Modulo Affects on the Signal Scaling
This table lists how the values of InputModuloPosition and OutputModuloPosition affects the scaling of the signal.
|
InputModuloPosition Value |
OutputModuloPosition Value |
Scaling Effect |
Rollover Effect |
|---|---|---|---|
|
Non-zero |
Non-zero |
Output signal = (Input signal) x (OutputModuloPosition / InputModuloPosition) |
Output signal rolls over at OutputModuloPosition. |
|
0 (zero) |
0 (zero) |
Output signal = Input signal |
Output signal does not roll over. |
|
Non-zero |
0 (zero) |
Output signal = Input signal |
Output signal rolls over at OutputModuloPosition. |
|
0 (zero) |
Non-zero |
Output signal = Input signal |
Output signal rolls over at InputModuloPosition. |
Associated Data
- OutputValue: Output value of the data flows.
- IsReady: Boolean set to TRUE when the pipe block is ready.





