Open Loop Modality
Open loop modality is working if the Drive_Working_Settings.Motor Feedback_Check bit = 0.
This is the traditional use of a stepper motor. For open loop modality, use a stepper motor without an encoder.
Below is the list of Objects necessary for the configuration of the drive to work in open loop.
| Object Name | Note |
|---|---|
|
Mandatory |
|
|
Mandatory |
|
|
Mandatory |
|
|
Mandatory |
|
|
Mandatory |
|
|
Mandatory |
|
|
Mandatory |
|
|
Mandatory |
|
|
Typically set to the motor catalog data for Resistance (Motor_R) and Inductance (Motor_L). If Resistance is in Ohms and Inductance is in mH, then multiply values by 1000 when entering values into this parameter. Alternatively, omit the values if Motor RL Detection is enabled in the Working Setting tab in the Global Parameters window. (Drive_Working_Settings.Motor_RL_Detection bit = 1). |
|
|
Optional, typically set to 0. Defines a delayed start based on a set amount of time. If set to 50,000, this means 50,000 micro-seconds. The motor will start after a 0.5 second delay. |
|
|
Optional, typically set to 0. Defines a delayed start based on input pulses. Ex. If set to 5, the motor will start on the 6th pulse input. |
|
|
This Object allows the user to set some working features. |
|
|
This Object allows the user to set some working features. |
Diagram of elements in the movement profile
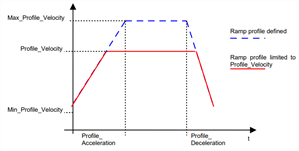
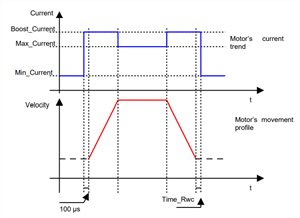
Diagram of the motor’s current reference in open loop