









Configuring the Command Source and Operating Mode
Overview
There are two basic components to how you will command the axis and how it will behave. The Command Source, AXIS#.CMDSOURCE, indicates how the axis will be communicated to. The axis has communication options via Ethernet, a variety of fieldbuses, through an analog input, and through Electronic Gearing. The Operation Mode, AXIS#.OPMODE, ties to which loop you will be controlling (torque, velocity, or position).
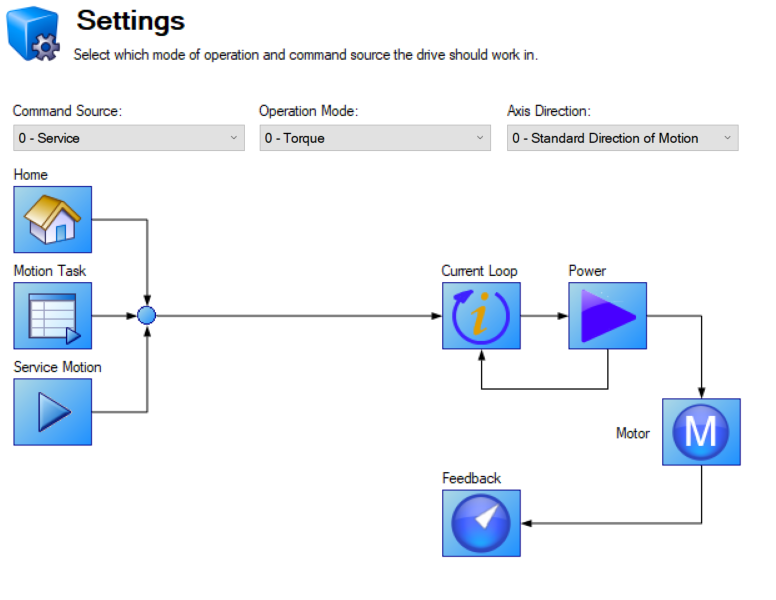
After selecting an axis to work with in the left-hand navigation area, select the Settings screen that belongs to that axis. This displays the graphical representation of both the Command Source and Operation Mode. Use the drop-down selections to choose the desired command type and control loop.
-
- Some Command Sources can only be used with certain Operation Modes. For example, Electronic Gearing can only be used in Position mode.
Command Source
The command source sets how you communicate with the axis.
Service
This is the most common source used when first establishing communications with the axis to set the system up. The Service source communicates with your PC using the Ethernet port located on the front of the axis (X20).
Fieldbus
When using a fieldbus, such as CANOpen or EtherCAT, the axis is set to this command source.
Electronic Gearing
If the axis will be used to follow the output of an external encoder, following motion using an electronic gear ratio, then you should use this command source. When using Electronic Gearing, the Operation mode must be set in the Position Loop mode. This is also the mode used for step and direction inputs as well.
Analog
This command source allows the axis to be controlled from an analog source. Varying the analog input will then vary torque, velocity, or position based on the Operation mode selected.
Operation Mode
The operation mode identifies which servo loop you will be controlling. The axis offers torque, velocity, or position control.
Axis Direction
The axis direction is set while the axis is disabled and determines whether the axis moves in the standard, or reversed direction when enabled.
Related Parameters






