![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Requests to either enable
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Requests to either enable![]() Enable signal for the drive, Hardware-Enable with 24V signal to X8, Software-Enable command by setup Software, fieldbus or permanently set.
Both are required for enabling the drive. the drive
Enable signal for the drive, Hardware-Enable with 24V signal to X8, Software-Enable command by setup Software, fieldbus or permanently set.
Both are required for enabling the drive. the drive![]() In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. and close the loop, or disable
In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. and close the loop, or disable![]() Removal of the ENABLE signal.
Disables power stage. the drive and open the loop.
Removal of the ENABLE signal.
Disables power stage. the drive and open the loop.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Enable |
BOOL |
FALSE, TRUE |
N/A |
No default |
When this transitions goes to high:
When this transitions go to low:
|
|
Axis |
AXIS_REF |
1, 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function
|
|
EnablePositive |
BOOL |
FALSE, TRUE |
N/A |
No default |
For future enhancement. |
|
EnableNegative |
BOOL |
FALSE, TRUE |
N/A |
No default |
For future enhancement. |
|
BufferMode |
SINT |
0 (zero) |
N/A |
No default |
Unused. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Status |
BOOL |
FALSE, TRUE |
N/A |
Indicates the enabled/disabled state of the drive. |
|
Busy |
BOOL |
FALSE, TRUE |
N/A |
Always FALSE. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates an invalid input was specified. |
|
ErrorID |
INT |
-32768 to +32767 |
|
Indicates the error if Error output is TRUE. |
Remarks
-
-
This function or function block returns cached data.
See Program a Multi-Core Controller.
- See Function Blocks - General Rules about how inputs and outputs work.
- The Status output indicates the state of the position
 Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different. loop.
Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different. loop. - If the position loop is open, the axis command position is set to the actual position of the axis and tracks Characterized by an axis group that follows with its movement the movement of another axis group. the actual position.
- If the position loop is open, the axis command position is set to the actual position of the axis and tracks
-
-
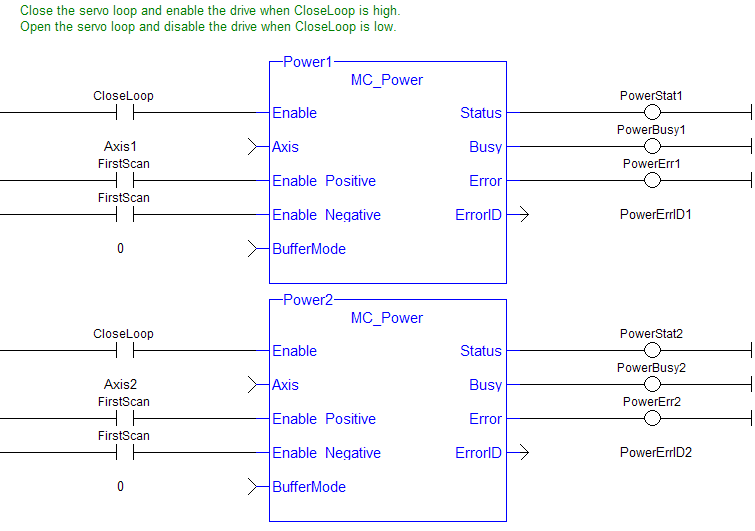
Be careful if there is more than one instance of MC_Power FB for the same drive, scanned in the same cycle.
The problem arises when one instance requests the drive to enable and the other requests the same drive to disable.
To avoid this trap, it is recommended to have only one instance of MC_Power for all active programs.
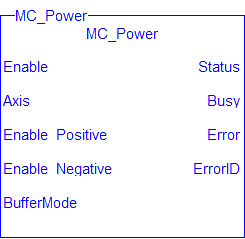
Figure 1: MC_Power
FBD Language Example
Not available.
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* MC_Power ST example *)
Inst_MC_Power( CloseLoopReq, Axis1, TRUE, TRUE, 0 );
//Inst_MC_Power is an instance of MC_Power function block
DriveIsOn := Inst_MC_Power.Status; //store the Status output into a user defined variable






