![]()
 Function
Function![]() A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Resets
A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Resets![]() New start of the microprocessor. the errors of the specified axis.
New start of the microprocessor. the errors of the specified axis.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
En |
BOOL |
FALSE, TRUE |
N/A |
No default |
Requests to reset the axis errors. |
|
Axis |
AXIS_REF |
1, 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function.
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
OK |
BOOL |
FALSE, TRUE |
N/A |
Function block |
Remarks
- Makes the transition from the state ErrorStop to StandStill by resetting all internal axis-related errors and clearing pending commands.
- This does not affect the output of the FB instances.
-
-
This function or function block returns cached data.
See Program a Multi-Core Controller.
This function performs these tasks in sequence:
- Sends a request to the drive
 In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. to clear any drive faults that exists
In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. to clear any drive faults that exists - Resets the axis errors
-
-
The condition causing the axis error has to be corrected before calling this function. The axis error still remains until the error condition exists when this function is called.
See Transition Events and Actions, #15 in the status machine![]() The complete assembly of all connected parts or devices, of which at least one is movable. of the CANopen
The complete assembly of all connected parts or devices, of which at least one is movable. of the CANopen![]() CANopen® is a communication protocol and device profile specification for embedded systems used in automation for fieldbuses working in real time. protocol.
CANopen® is a communication protocol and device profile specification for embedded systems used in automation for fieldbuses working in real time. protocol.
Figure 1: MC_ResetError
FBD Language Example
Not available.
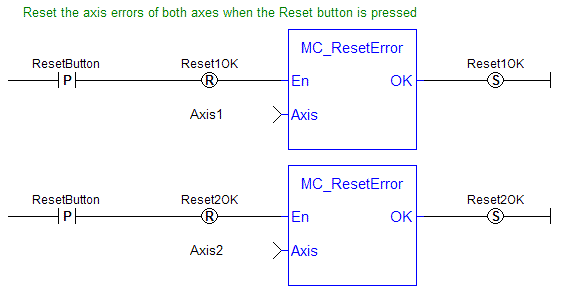
FFLD Language Example
IL Language Example
Not available.
ST Language Example
//reset the axis and drive errors for Axis 1
MC_ResetError( Axis1 );






