![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Returns the value of the specified axis parameter.
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Returns the value of the specified axis parameter.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
BOOL |
FALSE, TRUE |
N/A |
No default |
Request to read the axis parameter. |
|
|
Axis |
AXIS_REF |
1, 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function
|
|
ParameterNumber |
INT |
-32768 to +32767 |
N/A |
No default |
Parameter number. See Axis Parameters. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Valid |
BOOL |
FALSE, TRUE |
N/A |
Indicates the Value output is valid. |
|
Busy |
BOOL |
FALSE, TRUE |
N/A |
Indicates this function block is executing. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates an invalid input was specified. |
|
ErrorID |
INT |
-32768 to +32767 |
|
Indicates the error if Error output is TRUE. |
|
Value |
LREAL |
|
|
Value of the parameter. |
Remarks
-
-
This function or function block returns cached data.
See Program a Multi-Core Controller.
Returns the value of a drive![]() In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. parameter.
In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. parameter.
- The returned value has to be converted to REAL if required.
- If not possible, the vendor must provide a supplier-dependent FB for it.
See Function Blocks - General Rules about how inputs and outputs work.
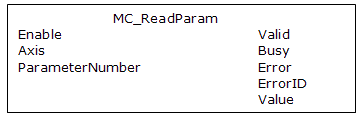
Figure 1: MC_ReadParam
FBD Language Example
Not available.
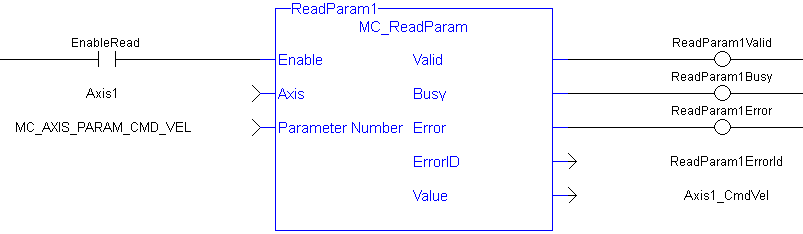
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* MC_ReadParam ST example *)
Inst_MC_ReadParam( EnableRead, Axis1, MC_AXIS_PARAM_CMD_VEL );
Axis1_CmdVel := Inst_MC_ReadParam.Value;






