 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Performs a single-axis move to a specified endpoint position
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Performs a single-axis move to a specified endpoint position![]() Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different..
Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different..
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
Execute |
BOOL |
0, 1 |
N/A |
No default |
On the rising edge |
||||||||||||
|
Axis |
AXIS_REF |
1, 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function
|
||||||||||||
|
Position |
LREAL |
See Description. |
User units |
No default |
Endpoint position.
|
||||||||||||
|
LREAL |
No range |
User unit/sec |
No default |
Velocity setpoint |
|||||||||||||
|
LREAL |
No range |
User unit/sec2 |
No default |
Trapezoidal: Acceleration rate. S-curve: Maximum acceleration.
|
|||||||||||||
|
Deceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Trapezoidal: Deceleration rate. S-curve: Unused. |
||||||||||||
|
Jerk |
LREAL |
No range |
User unit/sec3 |
No default |
Trapezoidal: 0 (zero). S-curve: Constant jerk.
|
||||||||||||
|
SINT |
0, 4 |
N/A |
No default |
When Rollover Position is zero, a value of 0 must be specified. When Rollover Position is nonzero, a value of 1, 2, 3, or 4 must be specified.
If the Position input is the same as the axis's current position, then:
|
|||||||||||||
|
BufferMode |
SINT |
0, 5 |
N/A |
No default |
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
No range |
N/A |
Indicates the move completed successfully. |
|
Busy |
BOOL |
No range |
N/A |
High from the moment the Execute input goes high until the time the move is ended. |
|
Active |
BOOL |
No range |
N/A |
Indicates this move is the Active move. |
|
CommandAborted |
BOOL |
No range |
N/A |
Indicates the move was aborted. |
|
Error |
BOOL |
No range |
N/A |
Indicates either:
|
|
ErrorID |
INT |
No range |
N/A |
Indicates the error if Error output is TRUE. |
Remarks
-
- This function block starts a motion-related action and stores data for calculations and error checking.
See Call Function Blocks Multiple Times in the Same Cycle if using a dual-core controller.
See Main about how this function is used in the Hole punch project.
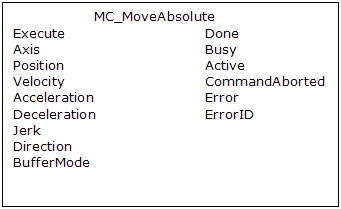
Figure 1: MC_MoveAbsolute
Time Diagram
These images show two examples of the combination of two absolute move![]() A positioning movement referenced to a fixed original position.
Example: If a stage is positioned at +500 mm, an absolute move to +300 mm would result in a move of 200 mm towards the origin (in the negative direction). Function Blocks (FBs):
A positioning movement referenced to a fixed original position.
Example: If a stage is positioned at +500 mm, an absolute move to +300 mm would result in a move of 200 mm towards the origin (in the negative direction). Function Blocks (FBs):
- The left part of the diagram illustrates when the second FB is called after the first one.
- If the first reaches the commanded position of 6000, and the velocity is 0 (zero), the output Done causes the second FB to move to the position 10000.
- The right part of the diagram illustrates when the second move FB starts the execution while the first FB is still executing.
- The first motion is interrupted
 An asynchronous signal from hardware indicating the need for attention or a synchronous event in software indicating the need for a change in execution. and aborted by the Test signal during the constant velocity of the first FB.
An asynchronous signal from hardware indicating the need for attention or a synchronous event in software indicating the need for a change in execution. and aborted by the Test signal during the constant velocity of the first FB. - The second FB moves directly to the position 10000 although the position of 6000 is not yet reached.
- The first motion is interrupted
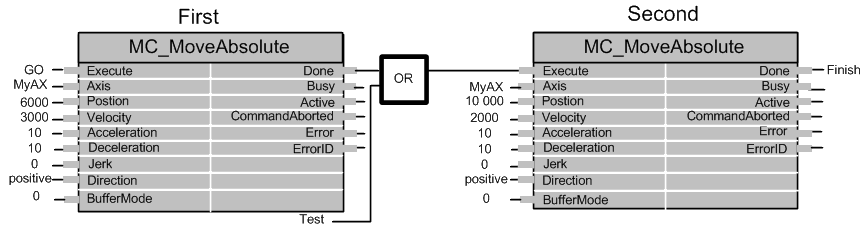
Figure 2: Time Diagrams: First and Second FBs
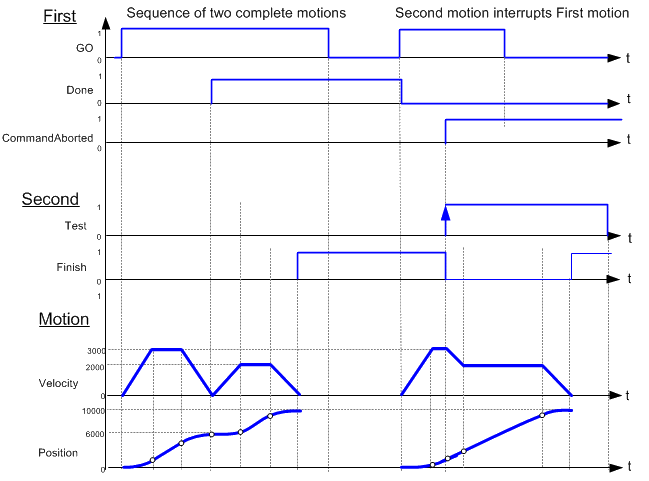
Figure 3: Time Diagram
FBD Language Example
Not available.
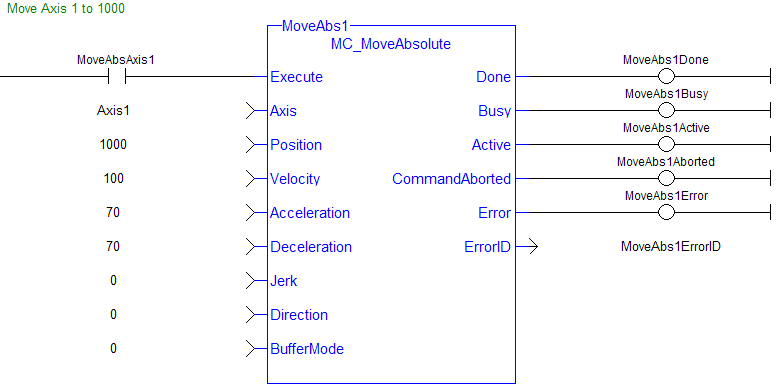
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* MC_MoveAbsolute S
T example *)
Inst_MC_MoveAbsolute( MovAbsReq, Axis1, 1234.567, 100.0, 100.0, 100.0, 0, 0, 0 ); //instance of MC_MoveAbsolute
MovAbsDone := Inst_MC_MoveAbsolute.Done; //store done output into user defined variable
MovAbsBusy := Inst_MC_MoveAbsolute.Busy;
MovAbsActive := Inst_MC_MoveAbsolute.Active;
MovAbsAborted := Inst_MC_MoveAbsolute.CommandAborted;
MovAbsError := Inst_MC_MoveAbsolute.Error;
MovAbsErrID := Inst_MC_MoveAbsolute.ErrorID;
See Also






