 Elektronisches Getriebe
Elektronisches Getriebe
Übersicht
Elektronisches Getriebe ist die Umschreibung für das Senden eines Positionsbefehls in Form digitaler Impulse an den AKD Servoverstärker. Stecker X9 dient zur Regelung des Servoverstärkers über ein A/B-Signal, Impuls und Richtung (auch als Schritt- und Richtung bezeichnet) oder einen CW/CCW-Befehl. Eine gängige Anwendung für das elektronische Getriebe ist der Einsatz von Servos mit einer Schrittsteuerung oder die Verkettung (Daisy Chain) mehrerer AKD Servoverstärker als Slave-Verstärker mit einem Master-Verstärker.
Zur Steuerung eines AKD mit elektronischem Getriebe muss die Sollwertquelle (DRV.CMDSOURCE) auf 2-Elektronisches Getriebe und die Betriebsart (DRV.OPMODE) auf 2-Position Mode gesetzt sein.

Die Eingangsmodi von Stecker X9 dienen zur Konfiguration des AKD für die Nutzung des elektronischen Getriebes.
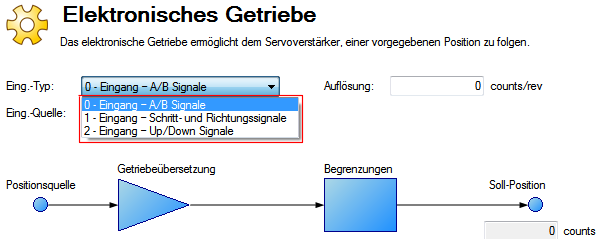
Die Auflösung ist der vervierfachte Wert der Schritte/Umdrehung des Eingangs. Zusätzlich kann eine Getriebeübersetzung angewandt werden, um die Abtriebsübersetzung des Motors anzupassen.
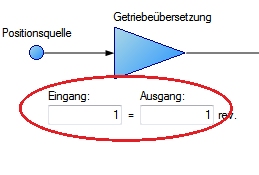
Der Positionsbefehl (DRV.HANDWHEEL) liest den EEO-Wert.Ein Wert von 4.294.967.296 entspricht einer vollen Umdrehung des Eingangs, anschließend läuft der Wert über. Die Getriebeübersetzung hat keinen Einfluss auf den EEO-Wert. Wenn der Ausgang auf 3 Ausgangsumdrehungen pro Eingangsumdrehung eingestellt ist, ergeben sich 4.294.967.296 Zählungen pro 3 Umdrehungen des Motors.
Grenzen
Das elektronische Getriebe verfügt über unabhängige Grenzwerte, wie unten gezeigt:
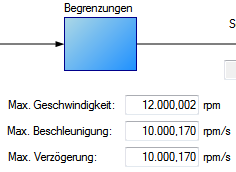
Diese Grenzwerte (GEAR.ACCMAX, GEAR.DECMAX, GEAR.VELMAX) werden nur im Getriebemodus angewandt.Die Einheiten sind mit den Einheiten für Drehzahl und Beschleunigung des Abtriebsmotors konsistent. Alle anderen Grenzwerte im Servoverstärker sind gemeinsam mit den Getriebegrenzwerten aktiv.
-
-
Da der Master das Fahrprofil des Slave bestimmt, ist es nicht üblich GEAR Grenzen zu setzen, um das Profil vom Master zu ändern. Fehlerhafte Bewegung könnten die Folge sein, da sie den Sollwert begrenzen können. Das kann z.B. bedeuten, dass sich bei Master-Slave Betrieb (Puls/Richtung) eine Slave AKD Achse weiterbewegt, auch wenn das Mastersignal vom Stecker X9 am Slave Gerät entfernt wurde. Wenn Sie Probleme feststellen, setzen Sie diese Grenzwerte auf das Maximum herauf.
Wenn sich der Master bei Eingabe des elektronischen Getriebemodus bereits bewegt, kann die Geschwindigkeit oder Position abgestimmt werden (GEAR.MODE):

Bei der Geschwindigkeitsabstimmung beschleunigt der Motor auf dieselbe Geschwindigkeit, ungeachtet jeglicher Schrittverluste während der Beschleunigungsperiode.
Bei der Positionsabstimmung stimmt der Motor den Positionsbefehl vom Übergangspunkt ab, indem er beschleunigt, um die während der Beschleunigungsphase verlorenen Schritte aufzuholen.
Geschwindigkeit-Vorsteuerung Einstellung
In einigen Getriebeanwendungen muss VL.KVFF reduziert oder auf 0 gesetzt werden, um Geräusche zu reduzieren.
Ermittlung der maximalen Kabellänge
Wenn Sie einen externen Inkrementalgeber als Eingang in X9 verwenden, müssen Sie die maximal zulässige Kabellänge ermitteln.
-
-
Diese Informationen gelten nur bei Verwendung eines externen Encoders als sekundären Rückführeingang oder als Getriebebefehl (DRV.EMUEMODE3). Nicht anwendbar für alle anderen X9 Modi und wenn zwei AKD in einem Master/Slave System arbeiten.
Der X9-Anschluss verfügt über einen 5V-Ausgang zur Spannungsversorgung eines externen Inkrementalgebers.
Die maximale Kabellänge ist abhängig von der Stromaufnahme des externen Encoders und des zum Anschluss an X9 verwendeten Kabeltyps. Das folgende Beispiel dient als Anleitung zur Berechnung der maximalen Kabellänge für Ihre Anwendung.
Eigenschaften des X9-Anschlusses:
Nennversorgungsspannung: 5 V
Toleranz: 5%
Mindestversorgungsspannung: 4,75 V
Maximaler Strom: 0,25 A
Zulässiger Leitungsquerschnitt: 0,14 - 0,75 mm² (typisch für D9-Anschluss)
Hardware der Beispielanwendung:
Beispielhafter externer Encoder: Hengstler RI-36H (RS-422-Encoder) an X9-Anschluss.
Nennversorgungsspannung des Encoders: 5 V (+/- 10%)
Mindestversorgungsspannung: 4,5 V (berechnet anhand der o.g.Toleranz)
Maximal erforderlicher Encoder-Versorgungsstrom: 50 mA
Beispielkabel:
Lapp Li2YCY - 24 AWG (0,25 mm^2)
Schleifenwiderstand: 0,186 Ohm/m
Beispielberechnungen:
Maximal zulässiger Spannungsabfall am Kabel = 0,25 V
= (Mindestversorgungsspannung vom AKD) 4,75 V – (Mindestversorgungsspannung des RI-36H Encoders) 4,5 V
Maximal zulässiger Widerstand des Kabels an X9 = 5 Ohm
= (Maximaler Spannungsabfall am Kabel) 0,25 V ÷ (Maximaler Encoder-Strom) 0,05 A
Maximal zulässige Kabellänge für die Beispielanwendung = 26,9 m
= (Maximaler Kabelwiderstand) 5 Ohm ÷ 0,186 Ohm/m
Zugehörige Parameter







