Motion Bus and Fieldbuses
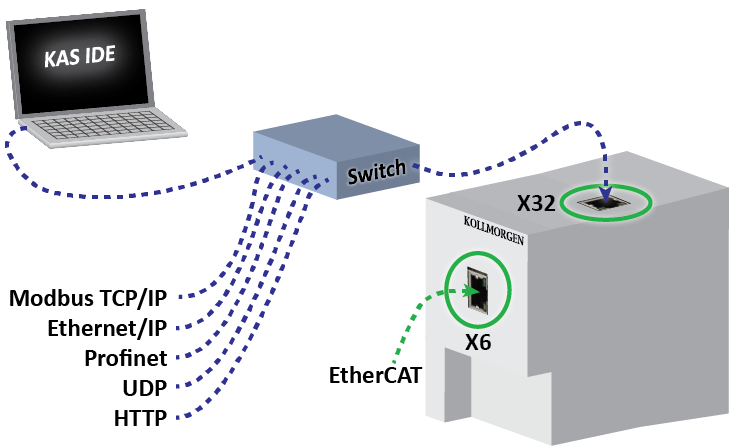
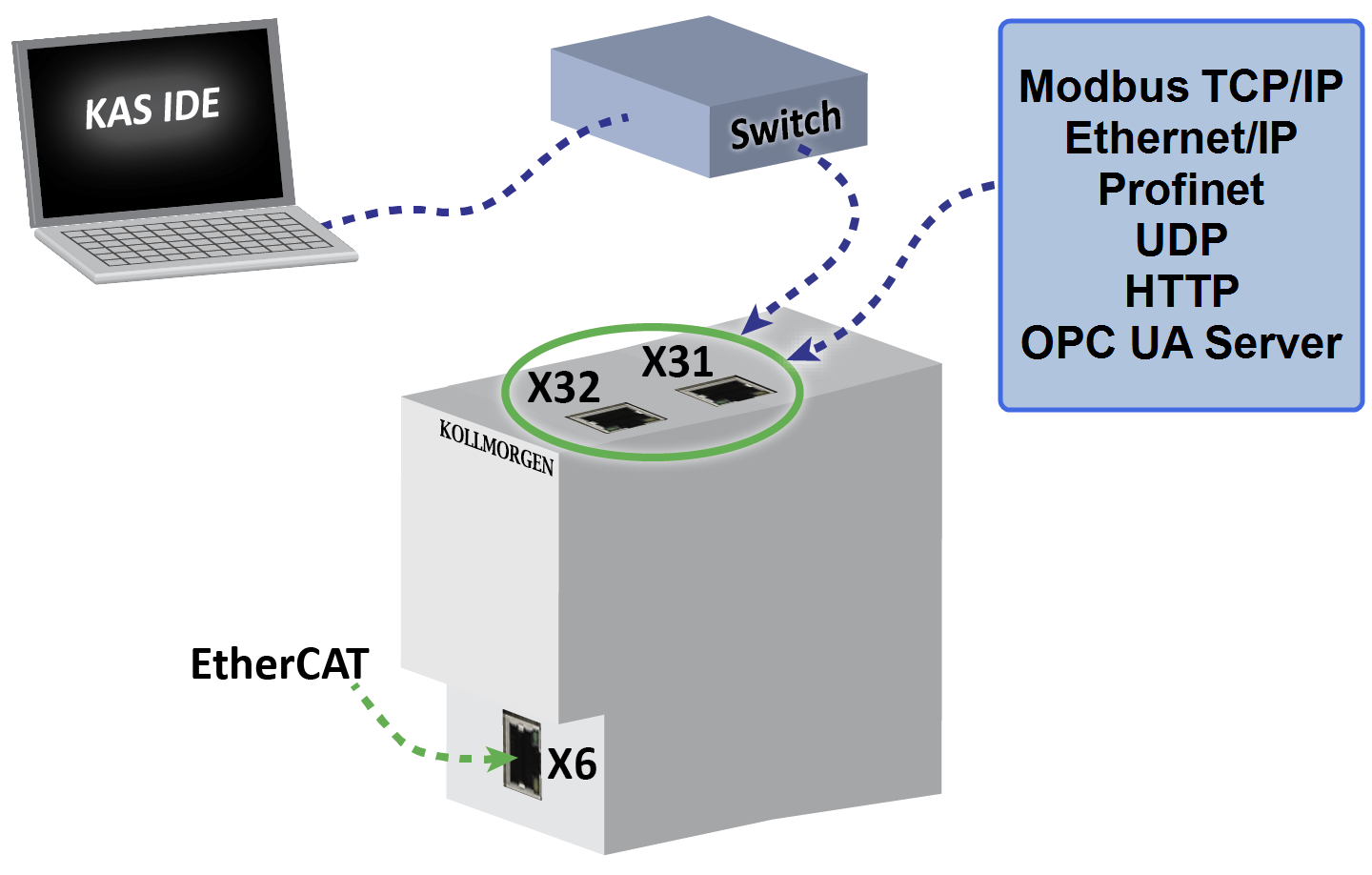
The controller can be connected to multiple Ethernet devices simultaneously by connecting a switch to the top of the controller:
-
-
See the Controller Performance Guidelines on how the CPU load is affected when transmitting and receiving data between network devices and PLC variables.
EtherCAT
- For configuration, see Configure EtherCAT Motion Bus.
- For I/O mapping, see Map Input and Output to Variables.
- For error management, see EtherCAT Error Messages.
- For EtherCAT XML Device Description, see the Beckhoff website.
EtherNet/IP
The KAS Runtime includes a fully integrated EtherNet/IP Adapter driver and Scanner driver for exchanging data with EtherNet/IP tag-based devices such as PLCs.
- EtherNet/IP Adapter (server), Scanner (client), Tag Client, and FlexIO/Point IO configurations are supported.
- Use drag and drop for mapping PLC variables to PROFINET.
- Setting up EtherNet/IP IO Scanner (Client).
- Setting up EtherNet/IP Adapter (Server).
- Setting up EtherNet/IP Tag Client.
Modbus and TCP/IP
- Setting up Modbus Slave.
PROFINET
This fieldbus is PROFIBUS over Ethernet.
We define one controller and have one or more devices.
Configuration
- For configuring the controller, see Configure a PROFINET IO Controller.
- For configuring devices, see Configure a PROFINET IO Device.
OPC UA
The Open Platform Communications Unified Architecture (OPC UA) is a standardized, platform-independent communication protocol developed by the OPC Foundation.
- It is designed for secure, reliable, and interoperable machine-to-machine communication in industrial automation environments.
- The KAS Runtime includes a fully integrated OPC UA Server driver for exchanging data with OPC UA client devices (e.g., PLC, HMI, etc.)
- See OPC UA Server.





