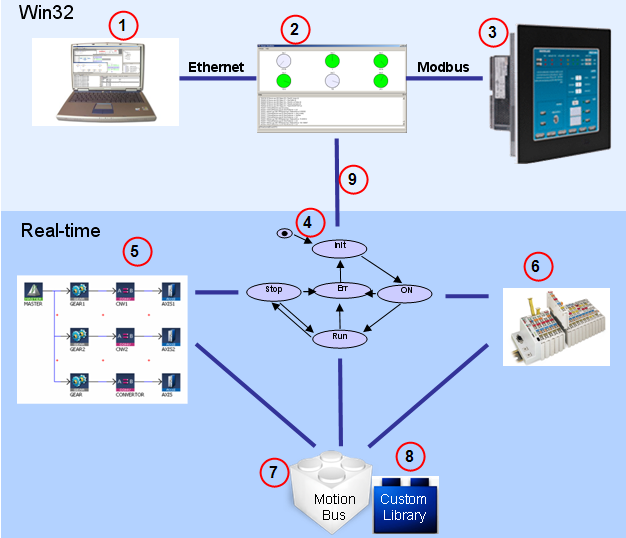
The block diagram shows KAS architecture with a Programmable Automation Controller platform running both Windows operating system and INtime real-time kernel.
Figure 2-8: Architectural view with a Programmable Automation Controller Implementation
The Win32 sub-system runs the non real-time part which is composed of:
Table 2-1: Architectural View - Win32 Sub-system
The RTOS platform runs the KAS Runtime engine which is composed of:
| Item | Call out# | Description |
|
|

|
Responsible for managing an IEC 61131-3 application with its programs and variables |
|
|

|
Manages motion engines, axis objects and motion bus drivers. The KAS Runtime comes with two motion engines: Pipe Network and PLCopen. The motion engine implements different motion algorithms and functions to create, access and delete pipes, pipe blocks and axes (e.g. MLAxisCreate, MLGearInit, MLPipeAct). It also provides a set of Functions and Function Blocks that IEC 61131-3 applications can use to control the behavior of these algorithms |
|
|

|
Manages I/Os and I/O drivers. It works closely with the VM Manager instances to map transparently all IEC 61131-3 variables declared as input or output |
|
|

|
A plug-in giving access to the EtherCATEtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network |
| custom function blocks |

|
A plug-in implementing custom function blocks |
Table 2-2: Architectural View - RTOS Sub-system
Interface between the Real-time and Win32 sub-systems.
| Item | Call out# | Description |
| interface |

|
Interface between real-time and non real-time software parts is done via shared memory buffers |
The Runtime communicates with the IDE during operation to:
When the KAS Runtime is implemented with a programmable drive, the interface between the real-time and non real-time parts is done via EthernetEthernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) based on TCP/IP protocol.
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |

|


