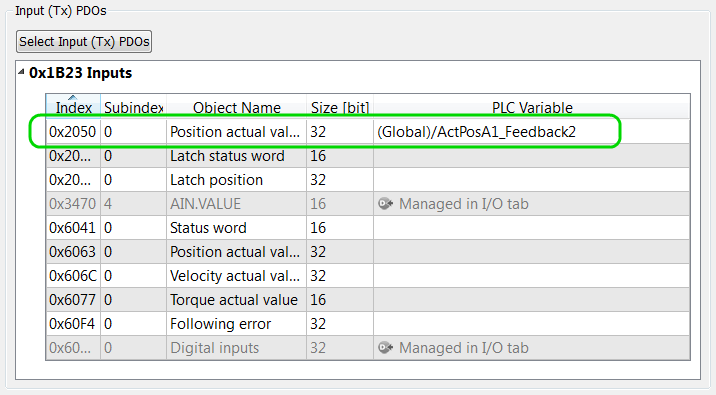
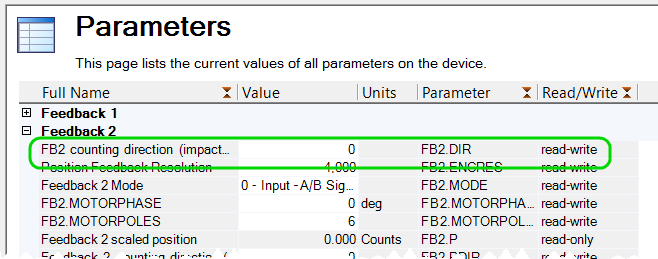
- If an Endat 2.2 device is being used, set FB3.DIR and change DRV.HANDWHEELSRC to 3 in order to tie the PDO index 2050 parameter that is read from FB2 to FB3.
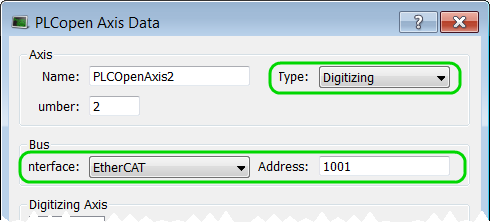
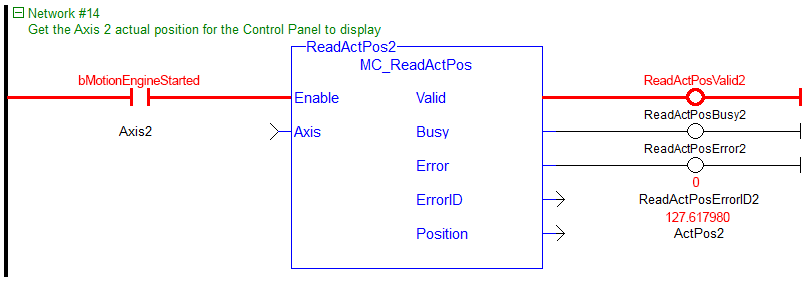
This topic provides the basics of setting up a digitizing axis and describes how to accomplish some common tasks. See Common Axis Parameters for reference material.
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |

|