The project has an error handling system to process faults. It consist of the following
| Type | Name | Output |
|---|---|---|
|
MachineThe complete assembly of all connected parts or devices, of which at least one is movable Level |
M1_ErrorHanding Program executing fbMainErrorHandler subprogram |
This Machine level program outputs a machine status word. Certain bits are set when an error occurs |
|
Axis Level |
Ax_ErrorHandling (one for each axis) executing fbAxisErrorHandler subprogram |
These axis level programs output a status word for each axis. Certain bits are set when an error occurs |
Each axis has a status word which causes certain bits to be set when an error occurs.
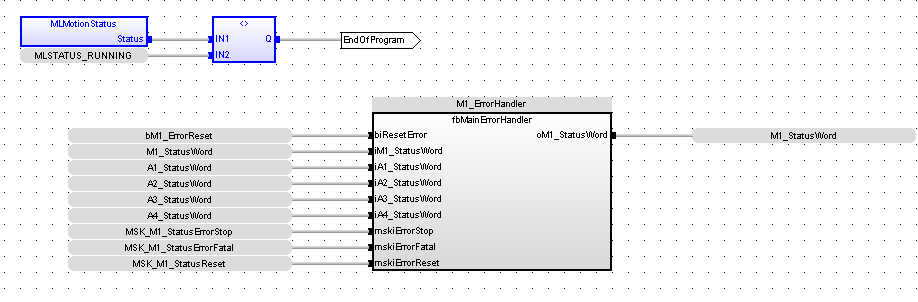
This program executes the fbMainErrorHandler subprogram which outputs the M1_StatusWord that provides an overall status of the machine.
fbMainErrorHandler inputs:
| Parameter | Input Name | Details |
|---|---|---|
|
bM1_ErrorReset |
biResetError |
ResetNew start of the microprocessor button in Control Panel screens |
|
A1_StatusWord |
iA1_StatusWord |
Axis1 Status |
|
A2_StatusWord |
iA2_StatusWord |
Axis2 Status |
|
A3_StatusWord |
iA3_StatusWord |
Axis3 Status |
|
A4_StatusWord |
iA4_StatusWord |
Axis4 Status |
|
MSK_M1_StatusErrorStop 16#00000201 |
mskiErrorStop |
A Defines parameter that sets which faults will place the state machine in the Error Stop State: Bits 0, 9 (see table below) |
|
MSK_M1_StatusErrorFatal 16#000000FE |
mskiErrorFatal |
A Defines parameter that sets which faults will place the state machine in the Error Fatal State: Bits 2 to 8 (see table below) |
|
MSK_M1_StatusReset 16#0000C2FF |
mskiErrorReset |
A Defines parameter that sets which faults will cause a drive reset: Bits 0 to 7, 9 (see table below) |
The Main Status Mask bit definition is as follows:
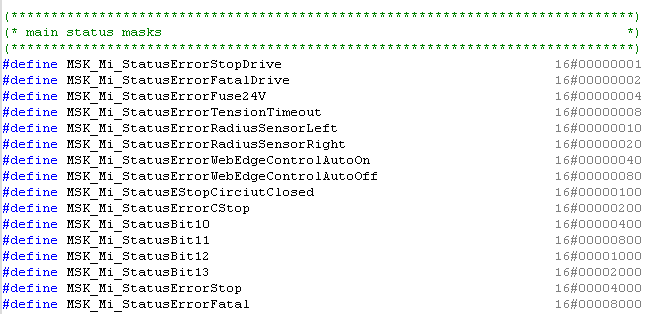
Details on each bit are as follows:
| Bit # | Description | Source of Information |
|---|---|---|
|
0 |
StatusErrorStopDrive |
Reads Ax_StatusErrorStop bit in the Axis status word for each axis. If any are set then this bit is set. |
|
1 |
StatusErrorFatalDrive |
Reads Ax_StatusErrorFatal bit in the Axis status word for each axis. If any are set then this bit is set. |
|
2 |
ErrorFuse24V |
Input Name: DI_M1_Fuse24VOK. |
|
3 |
ErrorTensionTimeOut |
Not Used |
|
4 |
ErrorRadiusSensorLeft |
Reads left winder radius sensorA sensor is a type of transducer that converts one type of energy into another for various purposes including measurement or information transfer, Input Name: DI_M1_RadiusSensorA1RTO |
|
5 |
ErrorRadiusSensoRight |
Reads right winder radius sensor, Input Name: DI_M1_RadiusSensorA4RTO |
|
6 |
ErrorWebEdgeControlAutoOn |
Input Name: DI_M1_WebEdgeCntrlAutoAndMaterial |
|
7 |
ErrorWebEdgeControlAutoOff |
Input Name:DI_M1_WebEdgeCntrlCenterPos |
|
8 |
EstopCircuitClosed |
Reads Output of PNOZ relay, Input Name: DI_M1_PilzPnozDelayed |
|
9 |
ErrorCStop |
Reads bAx_ControlStopSwitch for each axis. If any set then this bit is set. |
|
14 |
Error Stop |
If one of the bits determined by MSK_Mi_StatusErrorStop (bit 0 and 10) is set, then this bit is set. Machine state then goes into Error Stop State |
|
15 |
Error Fatal |
If bits determined by MSK_Mi_StatusErrorFatal (bits 1 to 7) are set then set this bit. Machine state then goes into Error Fatal State. |
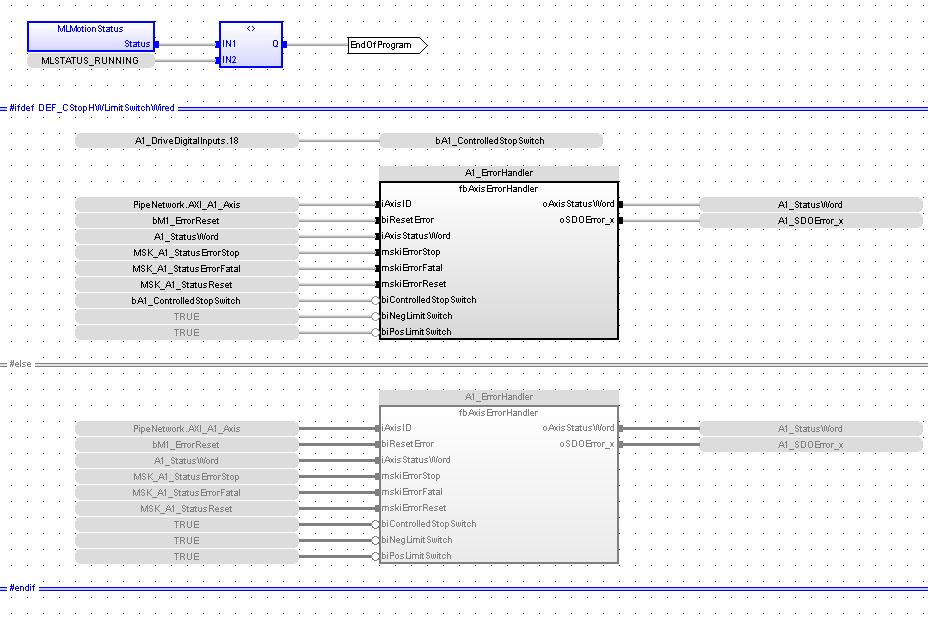
This program executes the fbAxisErrorHandler subprogram which outputs the Ax_StatusWord that provides individual axis status:
fbErrorHandler inputs:
| Parameter | Input Name | Details |
|---|---|---|
|
PipeNetwork.AXI_A1_Axis |
iAxisID |
Name of Axis (in pipe network) |
|
bM1_ErrorReset |
biResetError |
Reset button in the Kollmorgen AKI and Control Panel screens. |
|
A1_StatusWord |
iAxisStatusWord |
Present Axis Status |
|
MSK_A1_StatusErrorStop 16#0000000E |
mskiErrorStop |
A Defines parameter that sets which faults will place the axis state machine in the Error Stop State: Bits 0 to 3 (see table below) |
|
MSK_A1_StatusErrorFatal 16#00000041 |
mskiErrorFatal |
A Defines parameter that sets which faults will place the axis state machine in the Error Fatal State: Bits 0 and 6 (see table below) |
|
MSK_A1_StatusReset 16#0000C04F |
msk1ErrorReset |
A Defines parameter that sets which faults will cause a drive reset: Bits 0 to 3, 6,14, and 15 (see table below) |
|
ControlledStopSwitch |
biControlledStopSwitch |
Not Used |
|
NegLimitSwitch |
biNegLimitSwitch |
Not Used |
|
PosLimitSwitch |
biPosLImitSwitch |
Not Used |
The Axis Status Bits are as follows:
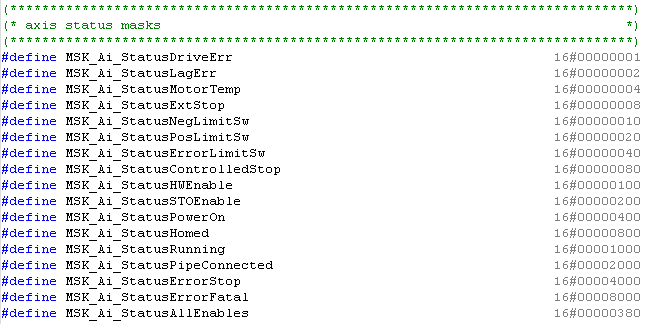
Details of each bit:
| Bit # | Description | Source of Information |
|---|---|---|
|
0* |
drive error |
DriveControl device for regulating the speed, torque and position of a motor error Information (SDO1003) |
|
1* |
motor position lag error |
Drive error Information (SDO1003) |
|
2* |
motor temperature too high |
Drive error Information (SDO1003) |
|
3* |
external stop
|
fbAKDErrorHandler Input (biControlledStopSwitch) or SDO1002 Bit 16 (AS EnableEnable signal for the drive, Hardware-Enable with 24V signal to X8, Software-Enable command by setup Software, fieldbus or permanently set. Both are required for enabling the drive. Input) or NOT SDO1002 Bit 29 (HW enable input) |
|
4* |
negative limit switch reached |
fbAKDErrorHandler(biNegLimitSwitch ) Input |
|
5* |
positive limit switch reach |
fbAKDErrorHandler(biPosLimitSwitch ) Input |
|
6* |
Drive parameter save or restore error, Set by SaveParamIntoFile FB in A1_StateController (Standby state) |
|
|
7* |
controlled Stop |
fbAKDErrorHandler Input (biControlledStopSwitch) |
|
8 |
drive HW enable |
Drive status Information (SDO1002 bit 29) |
|
9* |
drive AS enable |
Drive status information (SDO1002 bit 13) |
|
10 |
axis is powered on |
MLAxisStatus Bits 1 and 2 set |
|
11 |
axis is homed |
Set in A1_StateController after axis is homed |
|
12* |
axis is running |
Use MLAxisCmdPos FB to test if position command is changing |
|
13* |
pipe is connected to the axis |
MLAxisStatus FB Bits 8 output |
|
14 |
error stop |
Summary of multiple sources |
|
15 |
error fatal |
Summary of multiple sources |
*Axis errors are reset by the error reset button (bM1_ErrorReset) on the Kollmorgen AKI or internal Control Panel. The Axis Status Word bits that are reset is defined by the define parameter MSK_Ax_StatusReset. Default value is 16#0000C2FF which resets this bit.
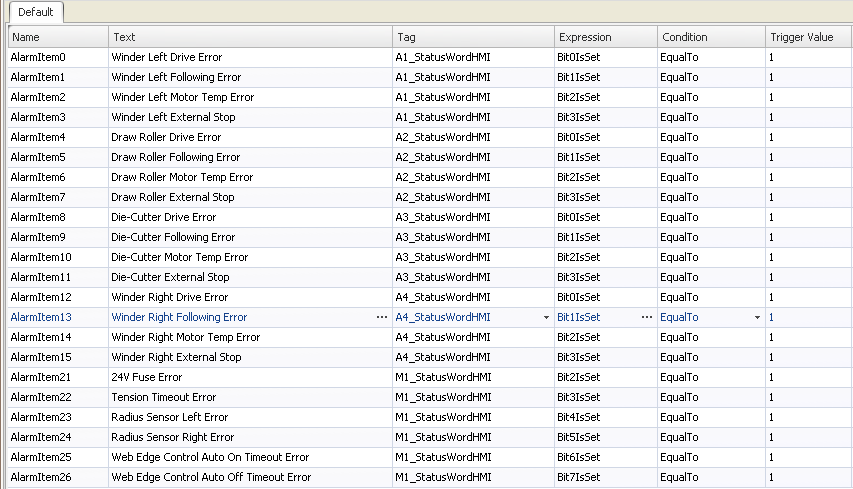
The Kollmorgen AKI contains alarms to notify the operator when certain issues occur:
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |

|