Open topic with navigation
Project Overview
Project Picture
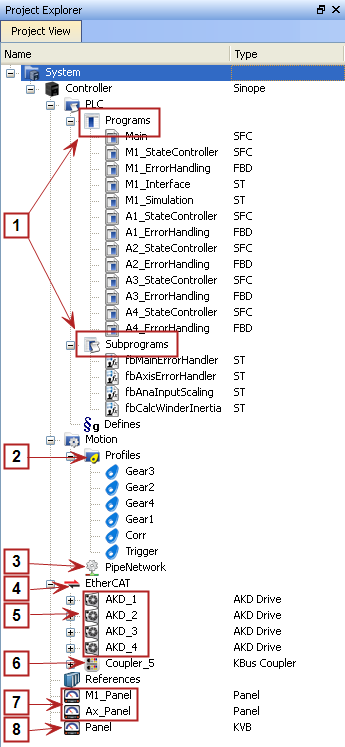
Below is the KAS Project Explorer view of the application:
|
- Programs and Subroutines
- CAMs
- PipeNetwork (PN) editor
- network
- configuring and commissioning
- Remote I/O commissioning
- Internal Control Panel used during start-up and for troubleshooting
-
|
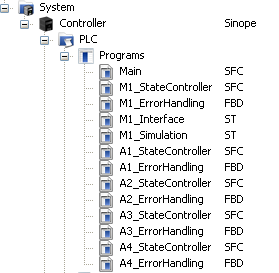
PLC Program Overview
This project makes use of a template that contains separate programs for individual axis level motion, multi-axis level motions and error handling both at the axis and main (or machine) levels:
The State Controller programs contain code that incorporates sections (of steps and transitions) for each machine state: Standby, Manual, Automatic, Error Stop, and Error Fatal. Particular sections will only contain code when it is necessary. Example 1: for making manual motion at the axis level the A1_StateController program contains code in the following Manual state section of the SFC program:
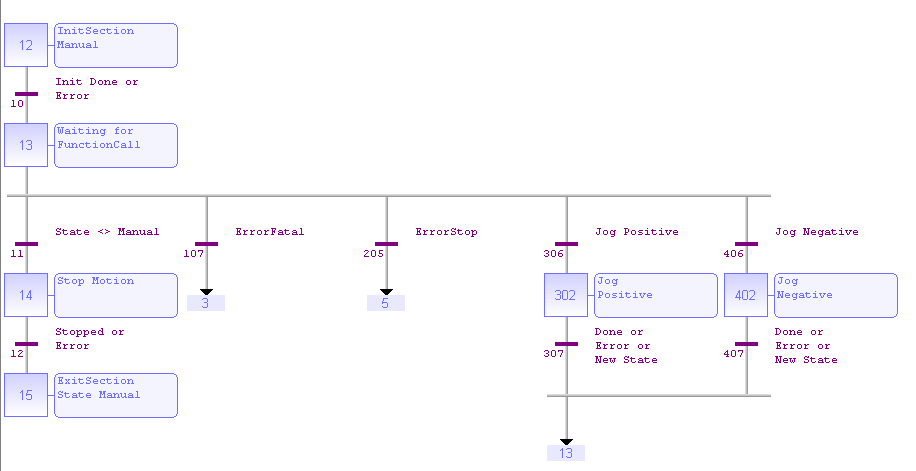
Example 2: In the A1_StateController Automatic section there is no code to make motion since this is handled by the Automatic Mode operation in the M1_StateController program.
The programming language in each step is typically .
|
|
Copyright © 2015 Kollmorgen™
|
|

|
Open topic with navigation






