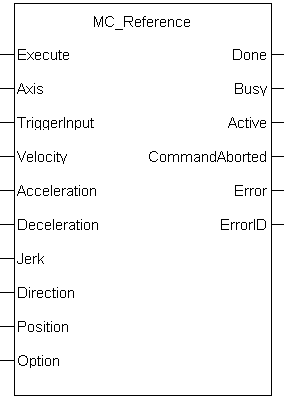
 MC_Reference
MC_Reference
Description
-
-
At this time, position capture is not available for PLCopen
 A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML axes assigned to the secondary feedback input (digitizing axes). Therefore, MC_Reference cannot be used to home digitizing axes at this time.
A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML axes assigned to the secondary feedback input (digitizing axes). Therefore, MC_Reference cannot be used to home digitizing axes at this time.
-
- There are a some differences between how an AKD and an AKD2G are used with this function block.
-
- This function block starts a motion-related action and therefore stores data for calculations and error checking. Please see Calling Function Blocks Multiple Times in the Same Cycle if you are using a dual-core controller.
Arguments
For more detail on how inputs and outputs work, refer to PLCopen Function Blocks - General Rules
Input
| Execute | Description | Requests to queue the MC_Reference move and arms reference trigger events |
| Data type | BOOL | |
| Range | 0, 1 | |
| Unit | N/A | |
| Default | — | |
|
Axis |
Description |
Name of a declared instance of the AXIS_REF library function. For more details,About Axis Name and Number) |
| Data type | ||
| Range |
[1,256] |
|
| Unit |
N/A |
|
| Default |
— |
|
|
TriggerInput |
Description |
TRIGGER_REF structure defines the trigger InputID INT : 0 = Touch Probe 1 / Capture Engine 0 1 = Touch Probe 2 / Capture Engine 1 Range is [0,1] Direction INT; 1 = rising edge Trigid INT; must be zero
|
| Data type |
TRIGGER_REF |
|
| Range |
See Description above |
|
| Unit |
N/A |
|
| Default |
— |
|
|
Velocity |
Description |
Commanded velocity for the reference move |
| Data type |
LREAL |
|
| Range |
— |
|
| Unit |
User unit/sec |
|
| Default |
— |
|
| Acceleration | Description | Commanded acceleration for the reference move |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec2 | |
| Default | — | |
| Deceleration | Description | Commanded deceleration for the reference move |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec2 | |
| Default | — | |
| Jerk |
Description | Commanded jerk |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec3 | |
| Default | — | |
| Direction | Description | Commanded Direction of the reference |
| Data type | SINT | |
| Range | [0,1] | |
| Unit | N/A | |
| Default | — | |
| Position | Description | The position the axis will be reset to when at the machine reference location |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit | |
| Default | — | |
| Option | Description |
Option identifier for Resolvers/Modulo reference. 0 = Use latched position for reference 1 = use resolver position of nearest null for reference 2 pole resolver 2 = use resolver position of nearest null for reference 4 pole resolver 3 = use resolver position of nearest null for reference 6 pole resolver 4 = use resolver position of nearest null for reference 8 pole resolver 5 = use resolver position of nearest null for reference 10 pole resolver … 15 = use resolver position of nearest null for reference 30 pole resolver |
| Data type | SINT | |
| Range | [0,15] | |
| Unit | N/A | |
| Default | — |
Output
| Done | Description | Indicates the reference move and position adjustment is complete |
| Data type | BOOL | |
| Busy | Description | Indicates this function block is executing |
| Data type | BOOL | |
| Active | Description | Indicates this move is the Active move |
| Data type | BOOL | |
| CommandAborted | Description | Indicates the move was aborted |
| Data type | BOOL | |
| Error | Description | Indicates an invalid input, or the move was terminated due to an error |
| Data type | BOOL | |
| ErrorID | Description |
Indicates the error if the Error output is high
|
| Data type | INT |
Usage
The following lists the steps for homing a PLCopen axis, using the MC_Reference function block. Not all of the steps are necessary depending on the configuration and the homing cycle design.
The sequence of events of a PLCopen homing cycle consists of the following steps:
- Ensure Axis is not on Reference switch.
If a switch is used in the homing cycle for the event or precondition to the event, check to ensure the axis is not already tripping the switches that trigger the event and precondition. If it is, move the axis off the switches. - Configure AKD capture engine
Configuration of the AKD capture engine is performed by writing drive CAN"Controller area network"
CAN is a broadcast, differential serial bus standard developed for connecting electronic control units. Each node is able to send and receive messages, but not simultaneously objects via SDO. It is accomplished with the ECATWriteSdo function. The AKD Capture mode must be set to POSITION CAPTURE.
The available configurations are discussed in AKD Capture Engine Configuration . Example AKD capture engine configurations and reference examples are discussed in PLCopen Homing Methods. - Call the MC_REFERENCE function to initiate optional homing motion and to arm the AKD capture engine
The MC_Reference function block selects the trigger edge (rising or falling edge) and arm the capture. Then, it optionally moves the axis to the reference location as directed by inputs to this function. When the AKD indicates that the capture event has occurred, the coordinate system is shifted so that the reference position input to this function block is set to the reference location. Then, the reference motion is stopped. - Wait for the completion of the MC_Reference function block
The application is notified by the completion, abort or error of the homing by the MC_Reference function block. - Upon completion of the MC_Reference function block, the axis can be moved to the home position with a MC_MoveAbsolute function block.
For more details, see "PLCopen Homing"
-
-
Once the MC_Reference block is queued, but before it is completed, the cycle can be aborted with a MC_Halt or MC_Stop function block or by queuing a new motion function block with the Abort selected for buffer mode.
Related Functions
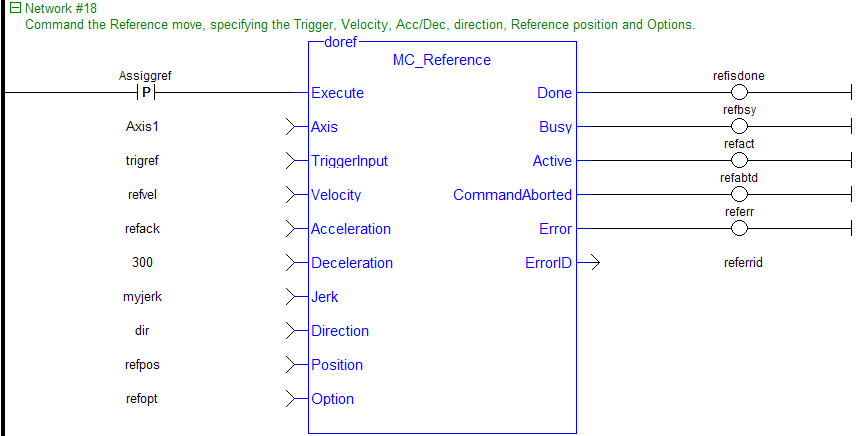
Example
Structured Text
(* MC_Reference ST example *)
TriggerInput.InputID := 0; //configure the reference InputID
TriggerInput.DIRECTION := 1; //configure the reference direction
Inst_MC_Reference( RefReq, Axis1, TriggerInput, 20.0, 100.0, 100.0, 100.0, 0, 0.0, 0 );
Ladder Diagram
 [Top]
[Top]





