Description
SM.MODE defines the mode of service motion for each loop. Two types of service motion are available :
- A constant motion in one direction (endless or for a certain amount of time).
- An alternating motion.
The possible modes for this parameter are described in the following table:
|
SM.MODE |
Description |
Requirements |
|---|---|---|
|
0 |
Constant motion in closed current loop mode of operation.
The service motion can be stopped by using the DRV.STOP command. |
DRV.OPMODE = 0,1, or 2 DRV.CMDSOURCE = 0 |
|
1 |
|
DRV.OPMODE = 0, 1, or 2 DRV.CMDSOURCE = 0
|
| 2 | This mode executes the same service motion as mode 0. However, the motion is described by SM.I2, SM.T2 and SM.V2. This enables a change on the fly and is mostly used under fieldbus control. |
DRV.OPMODE = 0, 1, or 2 DRV.CMDSOURCE = 0 |
Ramps
The drive uses DRV.ACC and DRV.DEC for the ramps in DRV.OPMODE 1 (closed velocity) and 2 (closed position). The drive does not generate any ramps in service motion mode 0 and 1.
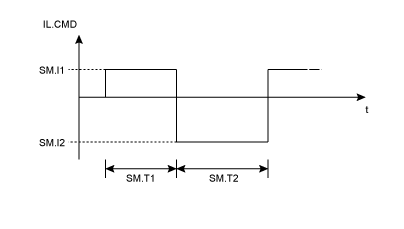
Service Motion for DRV.OPMODE 0 and SM.MODE 1
Service motion for DRV.OPMODE 1 or 2 and SM.MODE 1
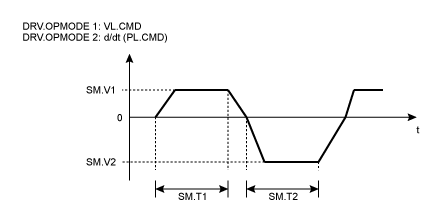
The deceleration process from SM.V1 or SM.V2 to 0 is not included in SM.T1 and SM.T2, respectively. SM.T1 and SM.T2 start as soon as the command value has reached the velocity 0.
General Information
|
Type |
NV Parameter |
|
Units |
N/A |
|
Range |
0 to 2 |
|
Default Value |
0 |
|
Data Type |
Integer |
|
See Also |
SM.I1, SM.I2, SM.MOVE, SM.T1 SM.T2, SM.V1, SM.V2, DRV.ACC DRV.DEC |
|
Start Version |
M_01-01-00-000 |
|
Index/Subindex |
Object Start Version |
|
|---|---|---|
|
5177h/0 |
M_01-01-00-000 |
Related Topics






