ACTION#.SOURCE
Description
This keyword defines the input source for an action.
| Value | Name | Description | Signal Type |
|---|---|---|---|
| 0 | No source | Default value of no specified source | N?A |
| 1 | Mains ready | This digital source goes high when the bus voltage is available to the drive. It does not take any ID or parameters. | Digital |
| 2 | Digital Input | This digital source corresponds to a DIN. It takes an ID. | Digital |
| 3 | Digital Dio (Bidirectional) | This digital source corresponds to DIO. It takes an ID. | Digital |
| 4 | Velocity Feedback | This analog source holds the value of AXIS#.VL.FB . It takes an axis ID. | Analog |
| 5 | Axis Faulted | This digital source goes high when a fault exists on an axis. It takes an axis ID. | Digital |
| 6 | Home Complete | This digital source is high when a Home operation is completed on an axis. It takes an axis ID. | Digital |
| 7 | Motion Task in Position | This digital source is high when on an axis specified by the axis ID, a MotionTask specified by Source Parameter, has reached its position. It takes both ID and parameter. | Digital |
| 8 | Controlled Stop Active | This digital source is high when a Controlled Stop is active on an axis. It takes an axis ID. | Digital |
| 9 | Software Limit | This digital source is high when a software limit on an axis is reached. It takes an axis ID. | Digital |
| 10 | MT Not Running | This digital source is high if, on the axis specified by the source ID, either the Motion Task specified by the source parameter has stopped running (i.e. AXIS#.MT.RUNNING for that task went from 1 to 0) or, if the source parameter is set to -1, all Motion Tasks have stopped running (i.e. AXIS#.MT.RUNNINGTASK went from any other value to -1). This source does not check whether the actual position has reached the Motion Task’s target position. | Digital |
| 11 | Position Error, Absolute | This analog source holds the value of AXIS#.PL.ERR . It takes an axis ID. | Analog |
| 12 | Axis Enabled | This digital source holds the value of AXIS#.ACTIVE . It takes an axis ID. | Digital |
| 13 | Analog Input | This analog source holds the value of AIN#.VALUE. It takes as Source ID, the ID of AIN. | Analog |
| 14 | Current Command | This analog source holds the value of AXIS#.IL.CMD . It takes an axis ID. | Analog |
| 15 | Velocity Error | This analog source holds the value of AXIS#.VL.ERR . It takes an axis ID. | Analog |
| 16 | Velocity Command | This analog source holds the value of AXIS#.VL.CMD. It takes an axis ID. | Analog |
| 17 | Position Feedback | This analog source holds the value AXIS#.PL.FB . It takes an axis ID. | Analog |
| 18 | Axis Disable Immediately | This digital source goes high when the power stage is disabled or dynamic braking is applied. It takes an axis ID. | Digital |
| 19 | Brake State | This digital source holds the value of BRAKE#.STATE. It takes a Brake ID. | Digital |
| 20 | Ready to Operate (RTO/BTB) | This digital source goes high when the drive/axis is ready to operate, i.e., the power stage is ready and there are no axis faults. It can default to an ID of 0 for the entire drive or take an axis ID. | Digital |
| 21 | Compare Digital Inputs | This bit-mapped source shows the value of all the DINs and DIOs compared with a mask which is settable with UI. | Digital |
| 22 | Feedback Fault | This source holds the value of FB#.FAULTBITS. It takes a Feedback ID. | Digital |
| 23 | User Variable | This source holds the value of USER.INT#. It takes an ID. | Analog |
| 24 | Action Row Running | This digital source indicates if an Action Row is running, i.e. if the task is being executed (see ACTION.RUNNING). It takes an Action Row ID. | Digital |
| 25 | Current Feedback | This analog source holds the value of AXIS#.IL.FB . It takes an axis ID. | Analog |
| 26 | Recordable Parameter | This allows an action to be triggered by using any Recordable Parameter. When selected, the Source Text window now accepts an array parameter keyword and index. 26 – Recordable Parameter | Analog |
| 27 | Drive Initialized | This digital source goes high when the drive has finished initialization after booting. | Digital |
| 28 | Move Complete | This digital source is high if, on the axis specified by the source ID, either the motion task specified by the source parameter has stopped running (i.e. AXIS#.MT.RUNNING for that task went from 1 to 0) and the actual position is within AXIS#.SETTLE.P around the motion task’s target position or, if the source parameter is set to -1, all motion tasks have stopped running (i.e. AXIS#.MT.RUNNINGTASK went from any other value to -1) and the actual position is within AXIS#.SETTLE.P around the last motion task’s target position. It will only go low when the motion task is started again, not if the actual position is no longer within AXIS#.SETTLE.P around the target position. | Digital |
| 200 | Safe Input | ||
| 201 | Safe Dual Input | ||
| 202 | Safe Output | ||
| 203 | Safe Dual Output | ||
| 204 | STO active | ||
| 205 | SS1 active | ||
| 206 | SS2 active | ||
| 207 | SOS active | ||
| 208 | SBC active | ||
| 209 | SLS active | ||
| 210 | SSM active | ||
| 211 | SSR active | ||
| 212 | SDI_n active | ||
| 213 | SDI_p active | ||
| 214 | SLA active | ||
| 215 | SAR active | ||
| 216 | SLI active | ||
| 217 | SLP active | ||
| 218 | SCA active |
21 - Compare Digital Outputs
Some actions need to be triggered based on the state of multiple digital inputs. For such cases, the Compare Digital Inputs action source provides a mechanism for specifying a combination of digital input values.
A 32-bit word containing the states of all DIN pins (DIN.STATES) and bidirectional digital IO pins (DIO.STATES) is updated prior to running the action table rows. DINs are assigned bits 0-19, and DIOs are assigned bits 20-31.

To set up an action to run based on a digital input combination, set ACTION#.SOURCE to 21 (Compare Digital Inputs). ACTION#.SOURCEID is unused, and ACTION#.SOURCEPARAM defines a mask corresponding to the pins you wish to check. For example, to check DIN2, DIN5, and DIO3, set ACTION#.SOURCEPARAM to 4194322 (0x00400012).

Set ACTION#.CONDITIONVALUE to the specific value of the digital input combination you want to match. Continuing the example, to match the combination DIN2 = 1, DIN5 = 0, and DIO3 = 1, set ACTION#.CONDITIONVALUE to 4194306 (0x00400002).

When ACTION#.CONDITION is 2 (Follows) the comparison is continuously true if the digital input match is successful. When ACTION#.CONDITION is 1 (Inverts) the comparison is true if one or more of the digital inputs does not match its specified value. When ACTION#.CONDITION is 5 (Rising Edge![]() A rising edge is the transition of a digital signal from low to high. It is also called positive edge) the comparison triggers the action task on the first sample where the digital input matches. When ACTION#.CONDITION is 6 (Falling Edge) the comparison triggers the task on the first sample where one or more digital inputs fails to match.
A rising edge is the transition of a digital signal from low to high. It is also called positive edge) the comparison triggers the action task on the first sample where the digital input matches. When ACTION#.CONDITION is 6 (Falling Edge) the comparison triggers the task on the first sample where one or more digital inputs fails to match.
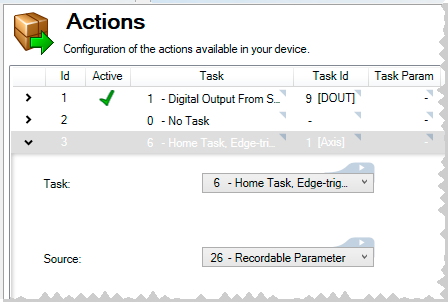
26 – Recordable Parameter
This Action Table Source allows the trigger of an action by using any Recordable Parameter (i.e., recordable values in the scope).
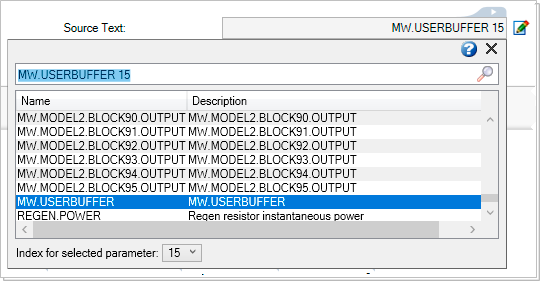
Once the source is set to Recordable Parameter, enter the recordable value into ACTION#.SOURCETEXT. The drive returns an error if an invalid recordable parameter is entered.
After the Recordable Parameter is accepted by the drive, the ACTION#.CONDITIONVALUE updates with appropriate unit conversion as well as the correct Unit label.
How to Set Up the Recordable Value Source
- Set an action source to Recordable Parameter (ACTION#.SOURCE) = 26
- Enter a recordable parameter in corresponding ACTION#.SOURCETEXT.
- Configure the ACTION#.CONDITION and ACTION#.CONDITIONVALUE
- Activate the action.
Recordable Parameter Value Source Example
-
Set ACTION#.SOURCE to 26 in the terminal, or the Source field to "26 - Recordable Parameter" within the Actions pane.
-
Set MW.USERBUFFER to 15 in the terminal, or the Source Text field to MW.USERBUFFER as the parameter keyword along with 15 as the index within the Actions pane.
-
Set ACTION#.CONDITION to 12 and ACTION#.CONDITIONVALUE to 6.50 in the terminal, or set the Condition field to "12 - Belcomes Equal To" and the Cond. Value field to 6.50 within the Actions pane (Also done with "MW.USERBUFFER 15 6.50" in terminal).

-
Once activated, the action will be triggered when the value of MW.USERBUFFER 15 becomes equal to 6.50.
Versions
| Action | Version | Notes |
|---|---|---|
| Implemented | 02-00-00-000 |
General Information
|
Type |
Read/Write |
|
Units |
N/A |
|
Range |
0 to 28 and 200 to 218 |
|
Default Value |
0 (no source) |
|
Data Type |
Integer |
|
Stored in Non Volatile Memory |
Yes |
Variants Supported
All variants are supported.






