![]()
 Function Block - Fast homing to a limit switch.
Function Block - Fast homing to a limit switch.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
Request the homing step procedure at the rising edge. Outputs are reset when execute input is FALSE. |
|
AxisID |
AXIS_REF |
1 to 256 |
N/A |
No default |
Structure for specified Axis designated to home. See AXIS_REF Structure. |
|
Direction |
BOOL |
FALSE, TRUE |
N/A |
No default |
Defines the axis homing direction.
|
|
LimitSwitchMode |
DINT |
0, 1 |
N/A |
No default |
Limit switch state to complete homing.
|
|
Velocity |
LREAL |
No range |
User unit/sec |
No default |
Commanded velocity for the homing move. |
|
Acceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Commanded acceleration for the homing move. |
|
Deceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Commanded deceleration for the homing move. |
|
Jerk |
LREAL |
No range |
User unit/sec3 |
No default |
Commanded jerk for the homing move. If 0 (zero), trapezoidal acc/dec is used. |
|
TorqueLimit |
LREAL |
No range |
User units |
No default |
Maximum torque applied for the homing move.
|
|
TimeLimit |
TIME |
No range |
Sec |
No default |
Maximum time for homing move to complete.
|
|
DistanceLimit |
LREAL |
No range |
User units |
No default |
Maximum distance for homing move to complete.
|
|
FastInputNum |
BOOL |
FALSE, TRUE |
N/A |
No default |
|
|
BufferMode |
SINT |
0, 5 |
N/A |
No default |
Define the homing move start action.
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
Indicates the move completed successfully. |
||||||||||||||
|
Busy |
BOOL |
FALSE, TRUE |
N/A |
High from the moment the Execute input goes high until the time the move is ended. |
||||||||||||||
|
Active |
BOOL |
FALSE, TRUE |
N/A |
Set when the function block is active. |
||||||||||||||
|
CommandAborted |
BOOL |
FALSE, TRUE |
N/A |
Indicates the move was aborted. |
||||||||||||||
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Signals an error has occurred within the function block. |
||||||||||||||
|
ErrorID |
INT |
Enumerated |
N/A |
Indicates the error if the Error output is set to TRUE. Error identifier:
|
Remarks
- Performs a homing function by searching for an external physical switch.
- The switch must be connected to one of the two fast inputs on the Axis' AKD drive.
- The Axis moves and, when a fast input is triggered, the triggered axis then performs an absolute move to the latched position.
This image shows the function or function block I/O.
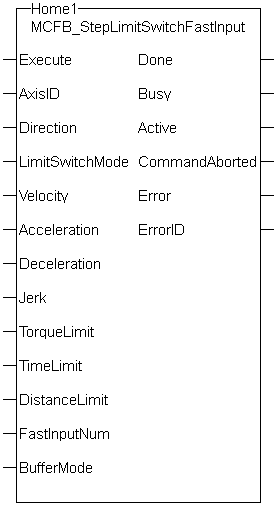
Figure 1: MCFB_StepLimitSwitchFastInput
Usage
The homing is commanded in the most likely direction where the sensor can be found.
In this example (-).
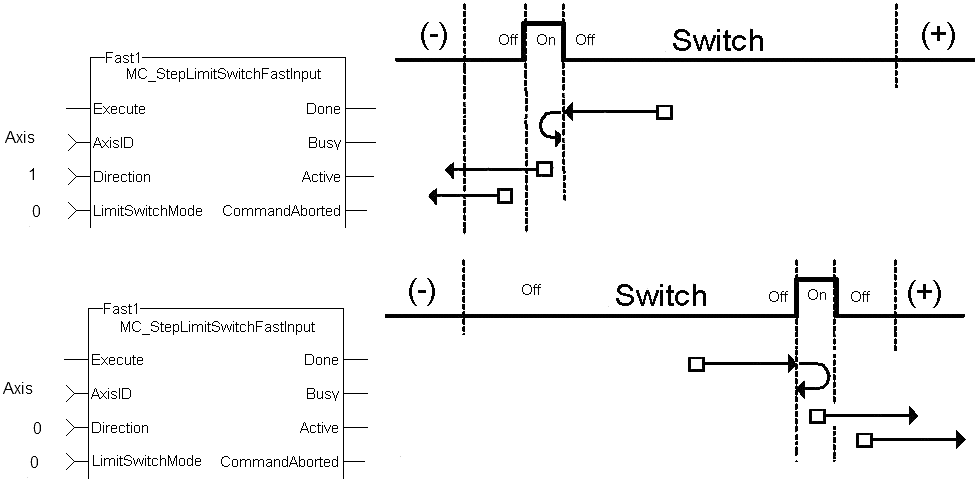
Figure 2: MCFB_StepLimitSwitchFastInput Usage
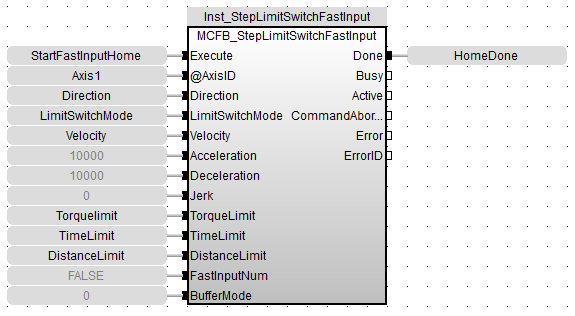
FBD Language Example
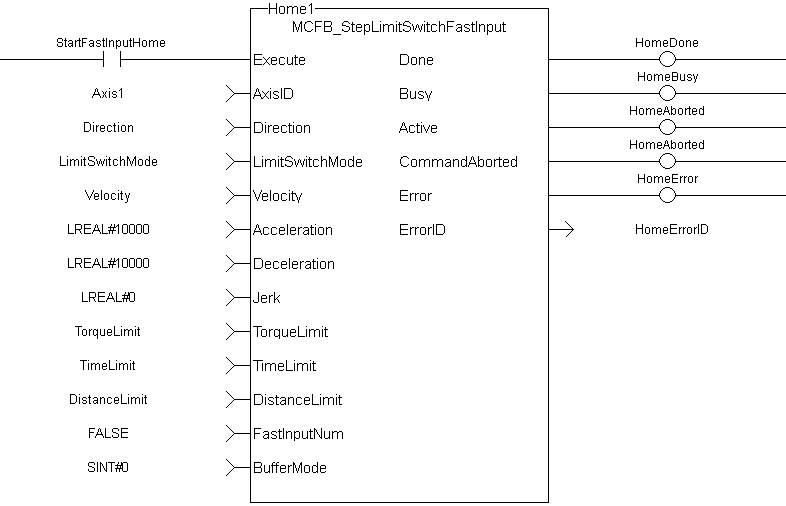
FFLD Language Example
IL Language Example
Not available.
ST Language Example
Execute_1 :=1;
Inst_MCFB_StepLimitSwitchFastInput( Execute_1, Axis1, 0, 0, 10000.0, 10000.0, 10000.0, 0, 0, 0, 0, 0, 0);
HomeComplete := Inst_MCFB_StepLimitSwitchFastInput.Done;
HomeBusy := Inst_MCFB_StepLimitSwitchFastInput.Busy;
HomeActive := Inst_MCFB_StepLimitSwitchFastInput.Active;
HomeAborted := Inst_MCFB_StepLimitSwitchFastInput.CommandAborted;
HomeError := Inst_MCFB_StepLimitSwitchFastInput.Error;
HomeErrorID := Inst_MCFB_StepLimitSwitchFastInput.ErrorID;
See Also






