![]()
![]()
 Function Block - Reads the EtherCAT master state and the lost frame counter to determine if EtherCAT is running normally.
Function Block - Reads the EtherCAT master state and the lost frame counter to determine if EtherCAT is running normally.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Enable |
BOOL |
FALSE, TRUE |
N/A |
No default |
Request to read the EtherCAT master state and the lost frame count. Continuously reads the master state and the lost frame count as long as the Enable remains high. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Valid |
BOOL |
FALSE, TRUE |
N/A |
Indicates the values at the State and LostFrameCount outputs are valid. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates whether this function block has completed with error. |
|
ErrorID |
DINT |
No range |
N/A |
Error code when the function block failed due to error. |
|
State |
UINT |
No range |
N/A |
Indicates the EtherCAT state of the Master. See State Defines for more information. |
|
LostFrameCount |
UDINT |
No range |
N/A |
Total cumulative number of cyclic frames sent with no-response since the EtherCAT started by calling the MLMoitonStart.
|
Remarks
-
- See Example: EtherCAT Communication Diagnosis Steps for more information.
State Defines
#define EC_STATE_NO_COMMUNICATION 0 (* 0x00 = No Communication to device *)
#define EC_STATE_INIT 1 (* 0x01 = Device in Init state *)
#define EC_STATE_PREOP 2 (* 0x02 = Device in Pre-operational state *)
#define EC_STATE_BOOTSTRAP 3 (* 0x03 = Device in Bootstrap state *)
#define EC_STATE_SAFEOP 4 (* 0x04 = Device in Safe-Operational state *)
#define EC_STATE_OP 8 (* 0x08 = Device in Operational state *)
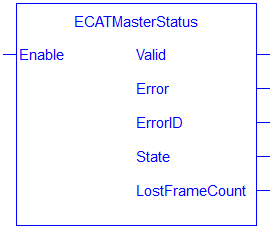
Figure 1: ECATMasterStatus
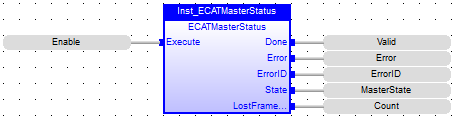
FBD Language Example
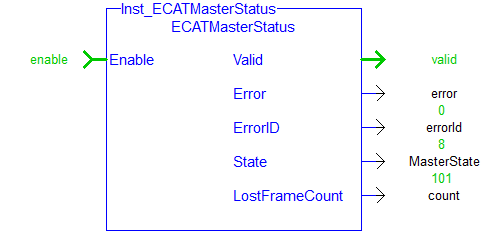
FFLD Language Example
IL Language Example
Not available.
ST Language Example
// ECATMasterStatus
Inst_ECATMasterStatus( True );
MasterSTate := Inst_ECATMasterStatus.State;
MasterLastFrameCount := Inst_ECATMasterStatus.LostFrameCount;
See Also






