![]()
 Function Block - Homing by setting Actual Position to the position of the feedback.
Function Block - Homing by setting Actual Position to the position of the feedback.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
En |
BOOL |
FALSE, TRUE |
N/A |
No default |
Enables execution. Used in the FFLD editor only. |
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
Request the homing step procedure at the rising edge. |
|
AxisID |
AXIS_REF |
1 to 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function. See AXIS_REF Structure. |
|
Mode |
BOOL |
FALSE, TRUE |
N/A |
No default |
Define the actual position assignment source.
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
Indicates the move completed successfully. |
|
Busy |
BOOL |
FALSE, TRUE |
N/A |
High from the moment the Execute input goes high until the time the move is ended. |
|
Active |
BOOL |
FALSE, TRUE |
N/A |
Indicates this move is the Active move. |
|
CommandAborted |
BOOL |
FALSE, TRUE |
N/A |
Indicates the move was aborted. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates either:
|
|
ErrorID |
INT |
Enumerated |
N/A |
Indicates the error if the Error output is set to TRUE. 1 = Desired SetPosition is outside of Rollover period. |
Remarks
- Performs a static homing function by setting Actual Position to the position of an absolute encoder.
- No physical motion is performed in this mode.
- Equivalent to MC_SetPosition is performed with SetPosition coming from absolute encoder reading but with the option of using the once per rev feedback value.
This image shows the function or function block I/O.
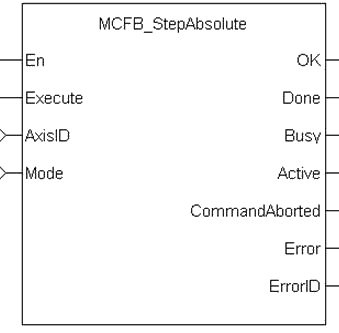
Figure 1: MCFB_StepAbsolute
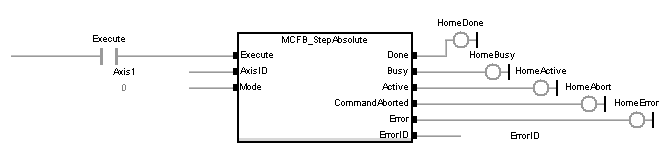
FBD Language Example
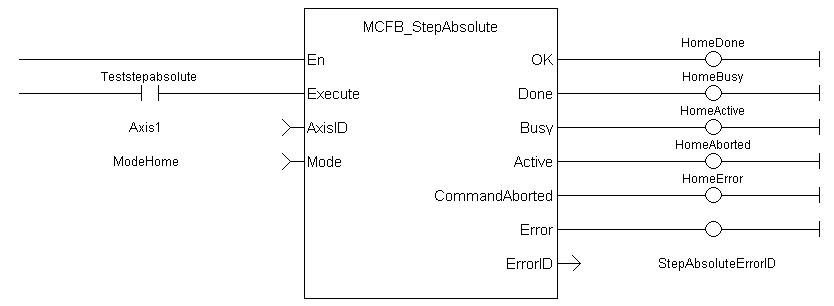
FFLD Language Example
IL Language Example
Not available.
ST Language Example
//Write current once per rev feedback position to overall axis position
MCFB_StepAbsolute( ExecuteHome, Axis1, ModeHome );
See Also






