![]()
![]()
 Function Block - Performs a controlled motion stop of all axes in the group.
Function Block - Performs a controlled motion stop of all axes in the group.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
On the rising edge, the command to stop all of the axes in the group is initiated. |
|
AxesGroup |
No range |
N/A |
No default |
The axes group the axes are stopped in. |
|
|
Deceleration |
LREAL |
No range |
User unit/sec2 |
No default |
The path deceleration rate for all axes in the group.
|
|
Jerk |
LREAL |
No range |
User unit/sec3 |
No default |
The path jerk for all axes in the group.
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, the command completed successfully. |
|
Busy |
BOOL |
FALSE, TRUE |
N/A |
TRUE from the moment the EXECUTE input is TRUE until the stop is complete. |
|
Active |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, the stop is still executing. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, an error has occurred. |
|
ErrorID |
INT |
-32768 to +32767 |
N/A |
Indicates the error if Error output is TRUE. |
Remarks
-
- MC_GrpStop can not be aborted.
-
- This function block starts a motion-related action and stores data for calculations and error checking.
If using a dual-core controller, see Call Function Blocks Multiple Times in the Same Cycle.
- When the path velocity reaches 0 (zero):
- Any queued moves are flushed from the buffer.
- The Done output is set.
- When the Done output is TRUE and the application has cleared, the Execute input state transitions to GroupStandby.
- MC_GrpStop does NOT prevent:
- A single axis from executing.
- Other Coordinated Motion moves from executing once MC_GrpStop has completed.
- See What MC_GrpStop Does.
- See Differences between MC_GrpHalt and MC_GrpStop.
- See Coordinated Motion, the top-level topic for Coordinated Motion.
- See Function Blocks - General Rules about how inputs and outputs work.
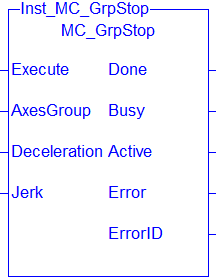
Figure 1: MC_GrpStop
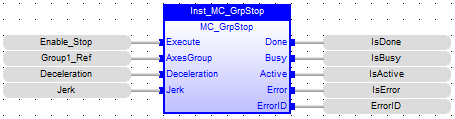
FBD Language Example
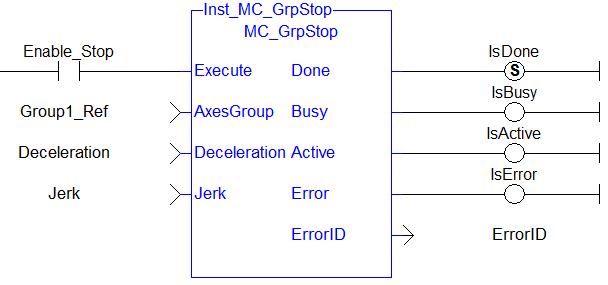
FFLD Language Example
IL Language Example
Not available.
ST Language Example
Inst_MC_GrpStop ( EnableStop, Group1_Ref, Deceleration, Jerk );






