What MC_GrpStop Does
ccpMC_GrpStop performs a controlled motion stop of all axes in a coordinated motion group.
See Differences between MC_GrpHalt and MC_GrpStop.
Example
This example demonstrates a linear coordinated move with a starting point of (0,0) and an endpoint of (200, 0).
- MC_GrpStop is called while the linear coordinated move is still moving to the endpoint.
- In the oscilloscope, the path velocity reaches zero (approximately [100,0]) before the linear coordinated move reaches its endpoint value.
|
Linear Move Parameters |
MC_GroupStop Parameters |
|---|---|
|
Velocity = 100 |
N/A |
|
Acceleration = 200 |
N/A |
|
Deceleration = 200 |
Declaration - 75 |
|
Jerk = 0 |
Jerk = 0 |
-
-
For demonstration purposes, it is assumed that the axes and group have been properly setup and configured.
Example steps to setup coordinated motion are listed in Create a Linear or Circular Coordinated Motion Application.
Inst_MC_GrpReadCmdPos(TRUE, Group1_ref, CS_ACS, CmdPositionArray); Inst_MC_GrpReadCmdVel2(TRUE, Group1_ref, CS_ACS, VelocityArray); CASE MC_MoveCounter OF0: // Enable the group Inst_MC_GrpEnable(TRUE, Group1_ref); Inst_TON3( true, t#1500ms ); // Allow for turning on the scopeIF ((Inst_TON3.Q) and (Inst_MC_GrpEnable.Done OR Inst_MC_GrpEnable.Error)) THEN Inst_TON3(false, t#1s); IF (Inst_MC_GrpEnable.Error) THENPrintMessage( LEVEL_INFO (*DINT*), 'MC_GrpEnable failed - ErrorID: ' + any_to_string(Inst_MC_GrpEnable.ErrorID)); END_IF; Inst_MC_GrpEnable(FALSE, Group1_ref); MC_MoveCounter := MC_MoveCounter + 1; END_IF; 1: // Perform Linear ABSOLUTE move start (0,0) end (200,0) PosAbs[0]:= 0; PosAbs[1]:= 200; PosAbs[2]:= 0; pathVelocity := Inst_MC_GrpReadCmdVel2.PathVelocity; Inst_MC_MoveLinAbs(TRUE, Group1_ref, PosAbs,Velocity, Acceleration, Deceleration, Jerk, CS_ACS, BM_ABORTING, TM_NONE, TransParam); Inst_TON3(true, t#600ms); //Allow for the move to reach path velocity before calling MC_GrpStopIF Inst_TON3.Q THEN MC_MoveCounter := MC_MoveCounter + 1; Inst_TON3(false, t#100ms); END_IF; 2: //Perform a stop on the group stop_deceleration := 75.0; pathVelocity := Inst_MC_GrpReadCmdVel2.PathVelocity; Inst_MC_GrpStop(TRUE, Group1_ref, stop_deceleration, default_jerk ); Inst_TON3( true, t#200ms ); IF ((Inst_TON3.Q) AND (Inst_MC_GrpStop.Done Or Inst_MC_GrpStop.Error)) THENIF Inst_MC_GrpStop.Error THENPrintMessage( LEVEL_INFO (*DINT*), 'Step '+any_to_string(MC_MoveCounter)+',MC_GrpStop ERROR. ErrorID('+any_to_string(Inst_MC_GrpStop.ErrorID)+'), Description:'+MC_ErrorDescription(any_to_int(Inst_MC_GrpStop.ErrorID))); END_IF; Inst_TON3(false, t#100ms); Inst_MC_MoveLinAbs(FALSE, Group1_ref, PosAbs, default_velocity, default_acceleration, default_deceleration, default_jerk, CS_ACS, BM_ABORTING, TM_NONE, TransParam); Inst_MC_GrpStop(FALSE, Group1_ref, stop_deceleration, default_jerk); END_IF;
When MC_GrpStop is called in the example:
- The current move is halted.
- A controlled motion stop is applied to axes group Group1_ref.
- The deceleration value, stop_deceleration, is set to 75.0 User unit/sec2.
- It is applied to the path velocity until it reaches 0 (zero).
- The group state is GroupStopping when the MC_GrpStop function block becomes active.
- While the axes group is in the GroupStopping state, no other function blocks can perform any motion on the same axes group.
- Once the path velocity reaches 0, the Done output is TRUE.
- The Execute input must be set to FALSE before the group state can go to GroupStandBy.
- Any coordinated moves in the buffer are flushed.
- New coordinated moves can be queued up upon completion of the MC_GrpStop command.
-
-
This behavior is different than the MC_GrpHalt command.
See Differences between MC_GrpHalt and MC_GrpStop.
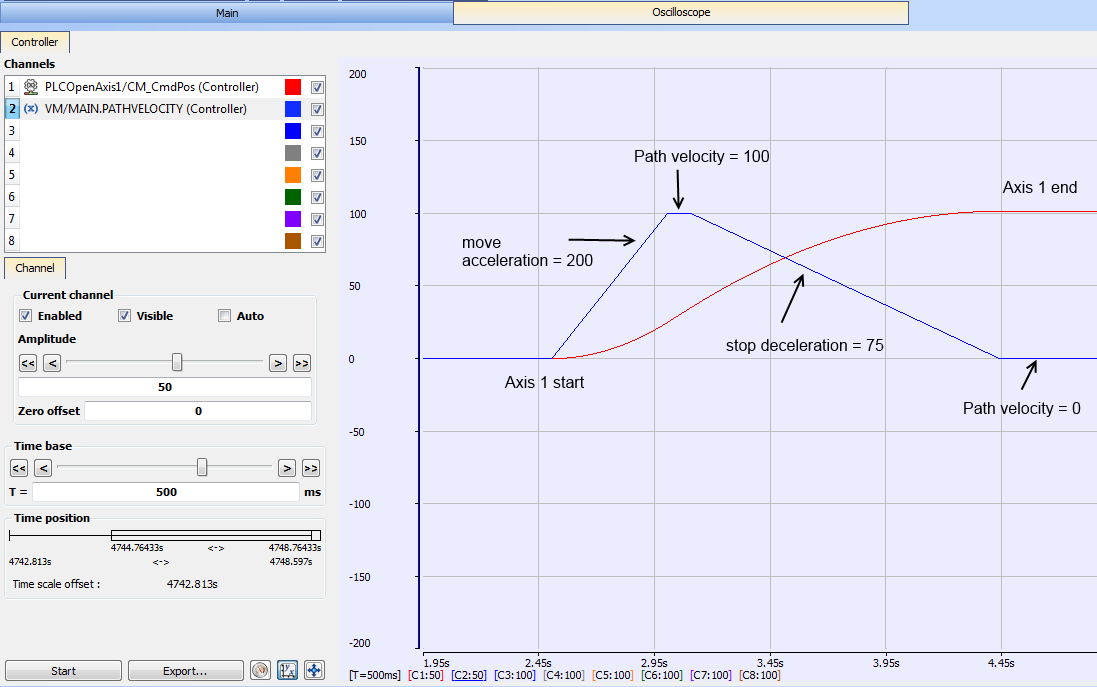
Figure 1: Oscilloscope Representation of linear coordinated move with a MC_GrpStop.
Exceptions
- The deceleration rate from the MC_GrpStop function block is only applied to the absolute and relative moves.
- Direct moves use the default deceleration value as defined by the AxisRef.
- MC_GrpStop cannot occur if a group is not enabled.
- An MC_GrpStop command cannot be aborted by any other commands.
- When there are two coordinated motion moves (Active and Next) in the queue, and the path velocity does not reach 0 (zero) before the end of the Active move, the path velocity continues to reach zero during the Next move.
- The deceleration rate is increased if there is only one Active coordinated move and the path velocity cannot reach zero before the endpoint.
- This prevents overshooting the endpoint.
- The stop action pauses during S-Curve Corner transitions.
- Any stop in progress continues after the S-Curve Corner transition is complete.
- If a stop is started during an S-Curve Corner transition, the stop action starts after the S-Curve Corner transition completes.
- While a stop action is in progress, there may be a discontinuity in acceleration at the endpoints of the S-Curve Corner transition.
- An MC_GrpStop command does not prevent performing a single axis motion.






