![]()
![]()
 Function Block - Commands interpolated circular movement on an axes group to the specified absolute positions in the coordinate system as specified by the CoordSystem argument.
Function Block - Commands interpolated circular movement on an axes group to the specified absolute positions in the coordinate system as specified by the CoordSystem argument.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
On the rising edge, request to perform a circular absolute move. |
||||||||
|
AxesGroup |
No range |
N/A |
No default |
The axis group that performs the circular absolute move. |
|||||||||
|
CircMode |
SINT |
Enumerated |
N/A |
No default |
Specifies the meaning of the AuxPoint[ ] input. One of these enumeration values:
|
||||||||
|
AuxPoint |
LREAL[ ] |
Dimension: The number of axes in the AxesGroup. No range |
N/A |
No default |
Required Precision
Description Array of absolute positions for each axis in the group. The meaning depends on the value of the CircMode input:
|
||||||||
|
EndPoint |
LREAL[ ] |
Dimension: The number of axes in the AxesGroup. No range |
N/A |
No default |
Required Precision
Description Array of absolute end positions for each axis in the group. |
||||||||
|
PathChoice |
SINT |
Enumerated |
N/A |
No default |
One of these enumeration values:
|
||||||||
|
Velocity |
LREAL |
0 < Velocity < (20 * Acceleration) and |
User unit/sec |
No default |
Maximum velocity of the defined path. |
||||||||
|
Acceleration |
LREAL |
Acceleration > (Velocity / 20) |
User unit/sec2 |
No default |
Maximum acceleration. |
||||||||
|
Deceleration |
LREAL |
Deceleration > (Velocity / 20) |
User unit/sec2 |
No default |
Maximum deceleration. |
||||||||
|
Jerk |
LREAL |
Trapezoidal velocity profiles: S-Curve velocity profiles: |
User unit/sec3 |
No default |
Maximum jerk. |
||||||||
|
CoordSystem |
SINT |
Enumerated |
N/A |
No default |
The coordinate system used when commanding the circular absolute move.
One of these enumeration values:
|
||||||||
|
BufferMode |
SINT |
Enumerated |
N/A |
No default |
Defines the chronological sequence of the function block relative to the previous block.
|
||||||||
|
TransitionMode |
SINT |
Enumerated |
N/A |
No default |
One of these enumeration values:
|
||||||||
|
TransitionParameter |
LREAL[ ] |
Dimension: 1 to N No range |
N/A |
No default |
This array is dependent on the specified TransitionMode.
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, the command completed successfully. |
|
Busy |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, the function block is executing. |
|
Active |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, the function block is controlling motion. |
|
CommandAborted |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, the command was aborted by another function block. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, an error has occurred. |
|
ErrorID |
INT |
Enumerated |
N/A |
Indicates the error if Error output is TRUE. |
Remarks
- See Coordinated Motion, the top-level topic for Coordinated Motion.
- See Circular Moves Diagrams about movement options.
- An error is returned if:
- The group is in the GroupDisabled state.
- The input parameters do not meet the required precision.
- See Precision Requirements for Circular Move Input Parameters for more information.
- When all motion has completed successfully, the axes group state is GroupStandby.
-
-
- Circular motion is only supported for axes groups with only two attached axes.
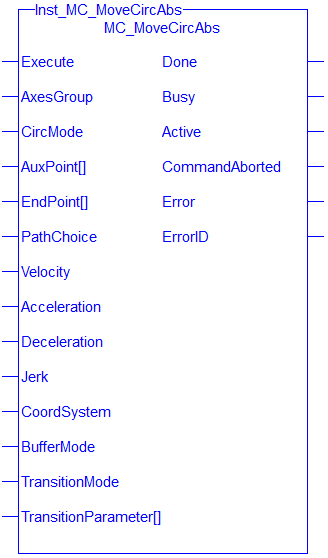
Figure 1: MC_MoveCircAbs
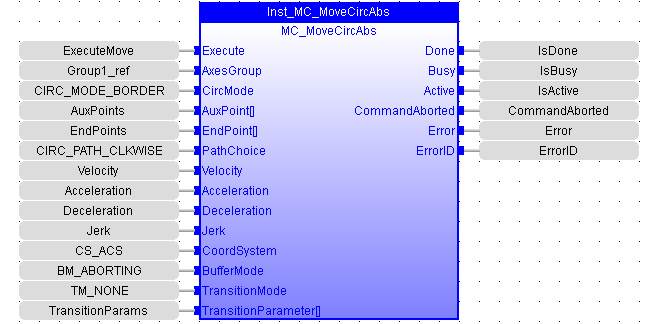
FBD Language Example
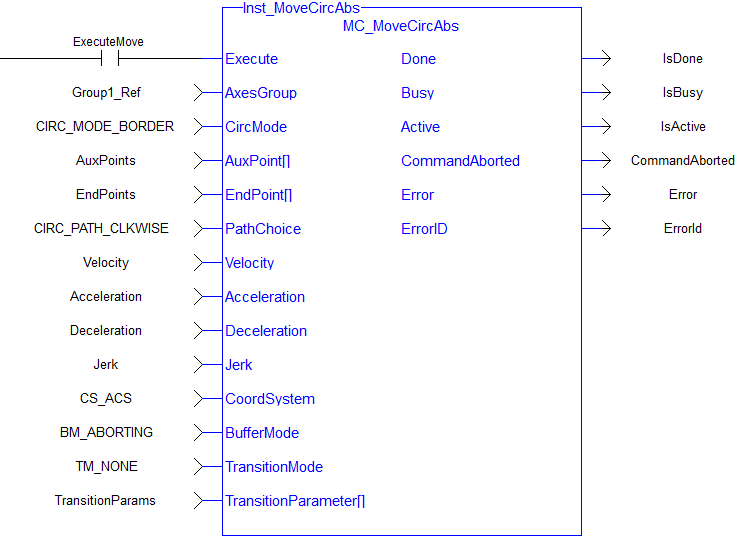
FFLD Language Example
IL Language Example
Not available.
ST Language Example
Inst_MC_MoveCircAbs(ExecuteMove, Group1_Ref, MC_CIRC_MODE_BORDER, AuxPoints, EndPoints, CIRC_PATH_CLKWISE, Velocity, Acceleration, Deceleration, Jerk, CS_ACS, BM_ABORTING, TM_NONE, TransitionParams);
See Also






