![]()
 Function Block - Performs a slave axis move which follows the master axis based on the ratio specified by RatioNumerator and RatioDenominator.
Function Block - Performs a slave axis move which follows the master axis based on the ratio specified by RatioNumerator and RatioDenominator.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
On the rising edge, request to queue the slave gear ratio move. |
|
Master |
AXIS_REF |
1 to 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function.
|
|
Slave |
AXIS_REF |
1 to 256 |
N/A |
No default |
AXIS_REF.AXIS_NUM is the slave axis number. See AXIS_REF Structure. |
|
RatioNumerator |
DINT |
-2147483648 to 2147483647 |
N/A |
No default |
Numerator of master/slave ratio. |
|
RatioDenominator |
DINT |
-2147483648 to 2147483647 |
N/A |
No default |
Denominator of master/slave ratio. |
|
Acceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Trapezoidal: Acceleration rate. S-curve: Maximum acceleration. |
|
Deceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Trapezoidal: Deceleration rate. S-curve: Unused. |
|
Jerk |
LREAL |
No range |
User unit/sec3 |
No default |
Trapezoidal: 0 (zero). S-curve: Constant jerk. |
|
BufferMode |
SINT |
0 to 1 |
N/A |
No default |
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
InGear |
BOOL |
FALSE, TRUE |
N/A |
Indicated the slave axis is locked on to the master axis. |
|
Busy |
BOOL |
FALSE, TRUE |
N/A |
High from the moment the Execute input goes high until the time the move is ended. |
|
Active |
BOOL |
FALSE, TRUE |
N/A |
Indicates this move is the Active move. |
|
CommandAborted |
BOOL |
FALSE, TRUE |
N/A |
Indicates the move was aborted. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates either:
|
|
ErrorID |
INT |
No range |
N/A |
Indicates the error if the Error output is set to TRUE. |
Remarks
SlaveCommandPosition = MasterActualPosition * RatioNumerator / RatioDenominator
-
- This function block starts a motion-related action and stores data for calculations and error checking.
If using a dual-core controller, see Call Function Blocks Multiple Times in the Same Cycle.
- See Function Blocks - General Rules about how inputs and outputs work.
- When this command is executed, the slave axis accelerates or decelerates (using the Acceleration, Deceleration, and Jerk) to the target velocity determined by the master axis velocity and the ratio.
- When the slave axis reaches a velocity within the In Gear bandwidth around the target velocity, it locks on to the master, and the InGear output goes high.
- See Axis Parameters.
- When the slave is locked to the master, the slave motion is no longer affected by the acceleration, deceleration, and jerk inputs.
- Example: If the In Gear bandwidth is set to 0.1 User unit/sec, the InGear output turns on if the slave velocity is within +/- 0.1 User unit/sec of the target velocity.
- The slave axis continues to follow the master axis until this move is aborted.
- See Main about how this function is used in the Hole punch project.
Aborting Gearing
Gearing functions can generate large accelerations while following the master.
- If the aborting function block has small, non-zero Jerk, or small acceleration values, it can take a long time for an accelerating axis to reach the target velocity, or position of the aborting function block.
- If the Jerk and/or acceleration of the aborting function cannot be increased to suitable values, it may be desirable to either:
- Abort the gearing function with an MC_GearOut with higher accelerations and/or Jerk values (or zero jerk value).
- Execute the next MC motion function block (e.g., MC_Halt).
- If the Jerk and/or acceleration of the aborting function cannot be increased to suitable values, it may be desirable to either:
Time to Reach the Target Velocity
While following the master, gearing functions can generate large accelerations.
- If the gearing function is aborted while the axis is currently accelerating, and the aborting function block has small non-zero Jerk or small acceleration values, it can take a long time to reach the target velocity, or position of the aborting function block.
- If the Jerk and/or acceleration of the aborting function cannot be increased to suitable values, it may be desirable to either:
- Abort the gearing function with an MC_GearOut with higher accelerations and/or Jerk values (or zero jerk value).
- Execute the next MC motion function block (e.g., MC_Halt).
- If the Jerk and/or acceleration of the aborting function cannot be increased to suitable values, it may be desirable to either:
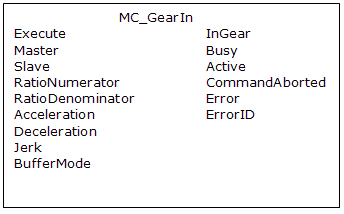
Figure 1: MC_GearIn
Time Diagram
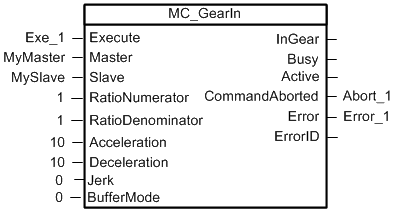
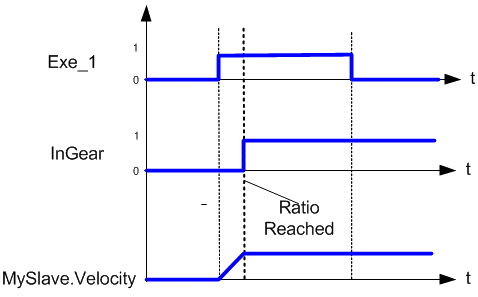
Figure 2: Time Diagram
FBD Language Example
Not available.
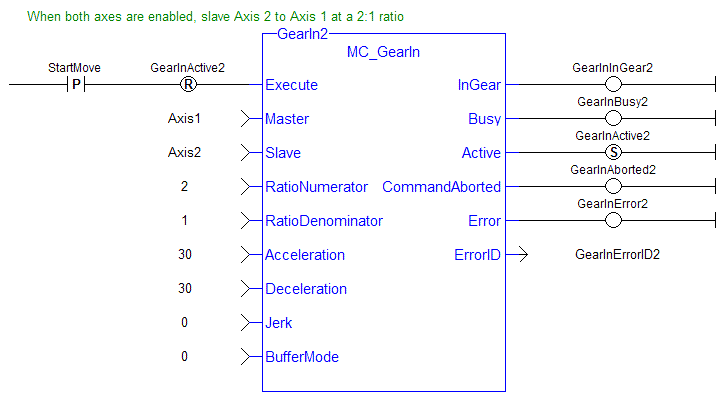
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* MC_GearIn ST example *) Inst_MC_GearIn( GearInReq, Axis1, Axis2, 2, 1, 150.0, 150.0, 0, 0 ); //Inst_MC_GearIn is an instance of MC_GearIn






