









Manual Tuning First Step: Understanding the Plant
The Plant [P]
To tune any system, there must be quality data to work from. If tuning is preformed based on poor measurements, the results will be poor performance.
The cornerstone of all tuning is the Plant [P] measurement, because the Plant describes what the mechanics will do when they are excited.
Most servo tuning is geared at overcoming the mechanical problems – if there weren’t mechanical resonances, tuning would be easy!
Because tuning is so dependent on the Plant [P], it just as important to know what the Plant [P] is supposed to look like.
The Ideal Plant
The drive makes all measurements on the Velocity Loop, therefore we have a Single Integral system.


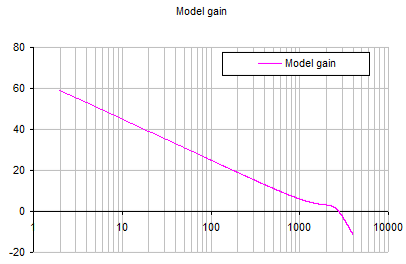
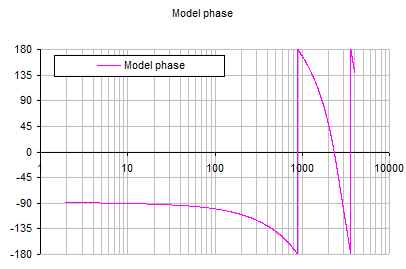
This is a Gain / Phase plot of an Ideal Single Integral Motor on the drive.
|
|
There are three key things to understand, in a perfect world:
-
Gain always decreases as frequency increases
-
Gain decreases at 20 dB/decade up to the current loop bandwidth
-
Phase for a single integral system always starts at -90 degrees and decreases
When one of these three things is NOT observed in the plant measurement, there is a non-ideal effect present that must be taken into consideration.
Comparing Ideal with Measured Data
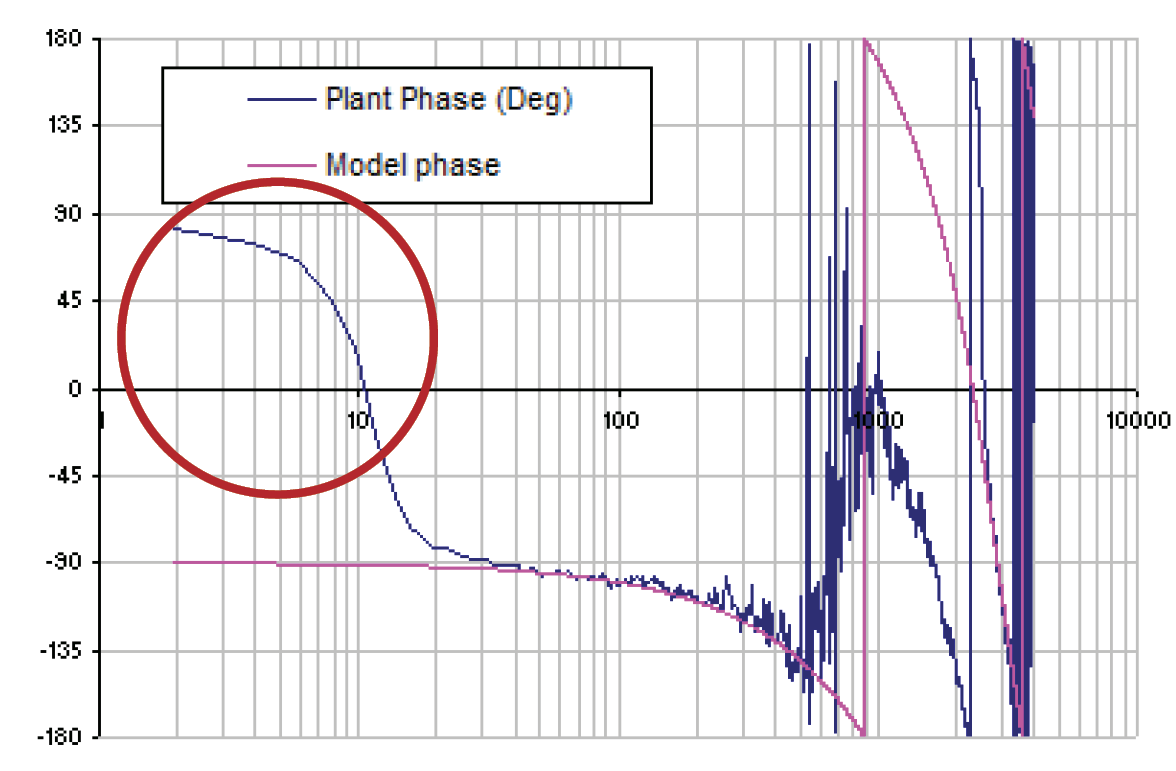
Here is a real bode plot from the drive on the same axis as the Ideal plant.
Noticing the differences will give you an idea of what challenges you face when tuning.
|
|
|

Differences:
-
Low frequency non-linearities do not decrease at 20 dB/decade.
Often this is caused by friction. It will often appear as extra phase in the low frequencies.
-
High frequency resonance are often caused by a shaft resonance. Lower frequency resonances are often caused by a flexible coupling.
-
Plant Gain
Simply noting the vertical position of the idealized plant on the Y-Axis(dB) identifies the System Gain: (Motor Torque Const Kt / Motor Inertia Kg*m²)
Note: this can be used to directly calculate the Acceleration feed forward value





