![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data. It has inputs and outputs. - Homing
A function block groups an algorithm and a set of private data. It has inputs and outputs. - Homing![]() The Homing procedure allows, based on a position measurement, to set a position offset to the motor in order to ensure it is physically at the home position by setting Actual Position to the position of the feedback.
The Homing procedure allows, based on a position measurement, to set a position offset to the motor in order to ensure it is physically at the home position by setting Actual Position to the position of the feedback.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
En |
BOOL |
No range |
N/A |
No default |
Enables execution. Used in the FFLD |
|
Execute |
BOOL |
0, 1 |
N/A |
No default |
Request the homing step procedure at the rising edge |
|
AxisID |
AXIS_REF |
1, 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function. See AXIS_REF Structure for more information. |
|
Mode |
BOOL |
0, 1 |
N/A |
No default |
Define the actual position assignment source.
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
|
N/A |
Indicates the move completed successfully. |
|
Busy |
BOOL |
|
N/A |
High from the moment the Execute input goes high until the time the move is ended. |
|
Active |
BOOL |
|
N/A |
Indicates this move is the Active move. |
|
CommandAborted |
BOOL |
|
N/A |
Indicates the move was aborted. |
|
Error |
BOOL |
|
N/A |
Indicates either:
|
|
ErrorID |
INT |
|
N/A |
Indicates the error if the Error output is set to TRUE. 1 = Desired SetPosition is outside of Rollover period. |
Remarks
- Performs a static homing function by setting Actual Position to the position of an absolute encoder.
- No physical motion is performed in this mode.
- Equivalent to MC_SetPosition is performed with SetPosition coming from absolute encoder reading but with the option of using the once per rev feedback value.
This image shows the function or function block I/O.
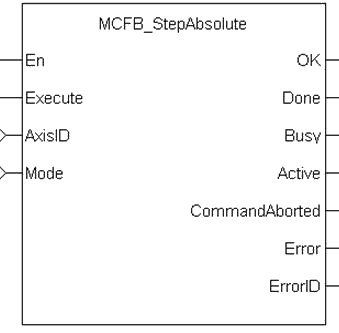
Figure 6-98: MCFB_StepAbsolute
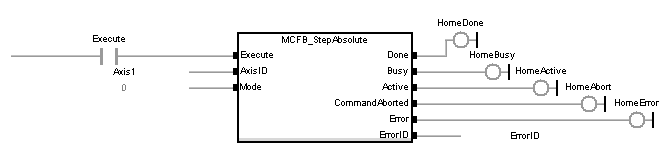
FBD Language Example
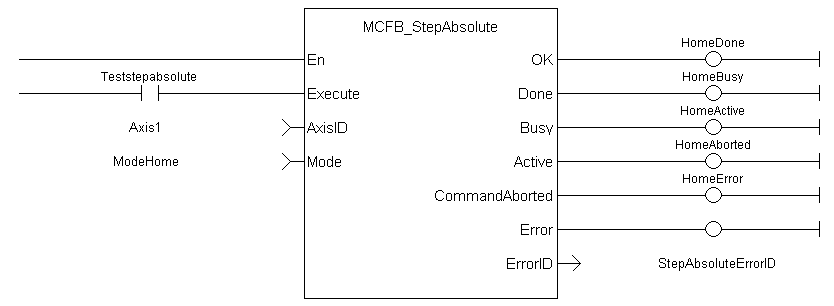
FFLD Language Example
IL Language Example
Not available.
ST Language Example
//Write current once per rev feedback position to overall axis position
MCFB_StepAbsolute( ExecuteHome, Axis1, ModeHome );
See Also






