![]()
 Function
Function![]() A function calculates a result according to the current value of its inputs. A function has no internal data and is not linked to declared instances. - Realigns the actual position with the reference position by moving the axis by the specified delta position.
A function calculates a result according to the current value of its inputs. A function has no internal data and is not linked to declared instances. - Realigns the actual position with the reference position by moving the axis by the specified delta position.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Acceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Sets the Realign Acceleration. See Set the Axis Block Position Units for more information. |
|
Deceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Sets the Realign Deceleration rate. See Set the Axis Block Position Units for more information. |
|
DeltaPos |
LREAL |
No range |
User units |
No default |
Sets the Axis Delta Position or the relative distance to be moved. See Set the Axis Block Position Units for more information. |
|
ID |
DINT |
No range |
N/A |
No default |
ID Name of the Axis block. |
|
Speed |
LREAL |
No range |
User unit/sec |
No default |
Sets the Axis Speed. See Set the Axis Block Position Units for more information. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Default (.Q) |
BOOL |
|
|
Returns TRUE when the function successfully executes. See Pipe Network - General Rules for more information. |
Remarks
-
-
The realign function does not work properly if the MLAxisStop function is continuously executed using its Start input.
- When stopping the drive a motion profile is applied to decelerate.
- During the deceleration, the Reference position changes.
- Calling MLAxisReAlign realigns the actual position with the reference position by moving the axis by the specified delta position, typically calculated by the application code.
- After a MLAxisStop is executed, MLAxisReAlign is required for the Pipe Position to be used again.
- See Restarting Motion with Pipe Network for more information.
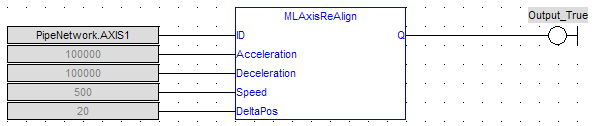
FBD Language Example
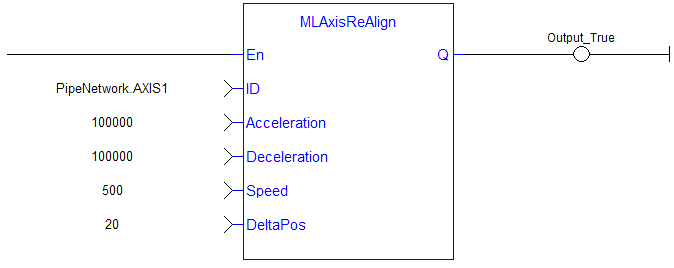
FFLD Language Example
IL Language Example
Not available.
ST Language Example
MLAxisReAlign(PipeNetwork.Axis1, 100000, 100000, 500, 20 ) ;
See Also






