![]()
![]()
 Function - Returns the status of the motion engine 0 (zero).
Function - Returns the status of the motion engine 0 (zero).
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
En |
BOOL |
FALSE, TRUE |
N/A |
No default |
Enable function. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
OK |
BOOL |
FALSE, TRUE |
N/A |
|
|
Status |
DINT |
0, 3 |
N/A |
Status of the Motion Engine. Based on the Internal Defines, the status is one of these:
|
Remarks
-
-
This function or function block returns cached data.
See Program a Multi-Core Controller.
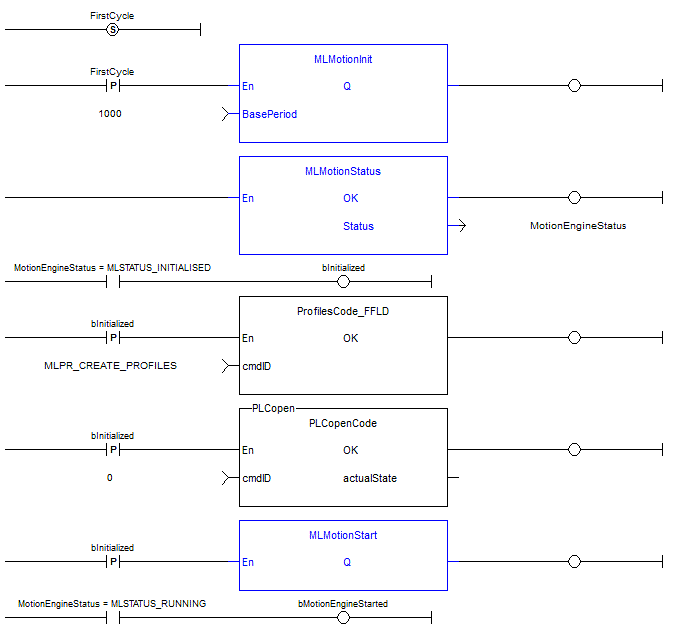
FBD Language Example

FFLD Language Example
IL Language Example
Not available.
ST Language Example
//Initialization code to start EtherCAT network.
//First initialize network with MLMotionInit command
//Then wait for command to finish by monitoring MLMotionStatus output
//Once initialized, create any cam profiles and PLCopen or Pipenetwork devices
//Then call MLMotionStart and monitor MLMotionStatus again before beginning rest of program
FirstCycle := TRUE;
On FirstCycle DO //Initialize the motion engine
MLMotionInit( 1000);
END_DO;
MotionEngineStatus := MLMotionStatus();//Check the current status of the motion engine
//Once motion engine is initialized, create CAM profiles and defined Axis, then start the motion engine
ON MotionEngineStatus = MLSTATUS_INITIALISED DO
Profiles( MLPR_CREATE_PROFILES );
PLCopen( 0 );
MLMotionStart();
END_DO;
IF MotionEngineStatus = MLSTATUS_RUNNING THEN
bMotionEngineStarted := TRUE;
ELSE
bMotionEngineStarted := FALSE;
END_IF;
See Also






