![]()
 Function Block - Allows the application to specify what slave axes are to be synchronized and which master they follow.
Function Block - Allows the application to specify what slave axes are to be synchronized and which master they follow.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
On the rising edge, request to queue the synchronization of a list of slave axes. |
|
Master |
AXIS_REF |
1 to 256 |
N/A |
No default |
Master axis identifier. |
|
SlaveCount |
AXIS_REF |
1 to 256 |
N/A |
No default |
The number of slave axes listed in the SlaveList array input that are to be synchronized.
|
|
SlaveList |
UINT |
1 to 32 |
N/A |
No default |
The list of slave axes that are to be synchronized.
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
Indicates the synchronized slave assignments were completed without error. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates an invalid input was specified. |
|
ErrorID |
INT |
|
|
Indicates the error if the Error output is set to TRUE. |
Remarks
-
- This function block starts a motion-related action and stores data for calculations and error checking.
If using a dual-core controller, see Call Function Blocks Multiple Times in the Same Cycle.
- See Function Blocks - General Rules about how inputs and outputs work.
- After this function block is executed successfully, all the slave axes specified at the SlaveList input start their slave moves (i.e., MC_CamIn, MC_GearIn, etc.) on the same servo interrupt for a synchronized slave start.
- When a slave move is commanded for one of the slave axes listed, the slave move is queued but the motion is held off until all of the listed slaves have queued their slave moves.
Figure 1: MC_SyncSlaves
Usage
- Call MC_SyncSlaves to specify the slave axes to synchronize.
- Call each slave move (e.g., MC_GearIn) for each slave axis.
- The motion is held off until all the slave moves have been queued.
- After all the slave moves have been queued, the interpolation for all the slave axes begin on the same servo interrupt, providing a synchronized start.
- The master axis can be in motion prior to this sequence or the master can be commanded after all the slave moves are queued.
FBD Language Example
Not available.
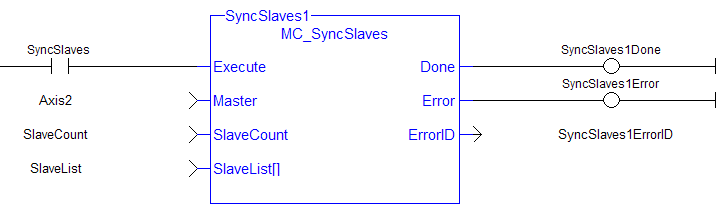
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* MC_SyncSlaves ST example *)
// Inst_MC_SyncSlaves is an instance of MC_SyncSlaves function block
Inst_MC_SyncSlaves( SyncSlaves, Axis1, SlaveCount, SlaveList );
See Also






