 Function
Function![]() A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Performs a move to an absolute position
A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Performs a move to an absolute position![]() Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different..
Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different..
This function sets a new target Generator Position.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
ID |
DINT |
-2147483648 to 2147483647 |
N/A |
No default |
ID Name of the Axis block. |
|
Position |
LREAL |
No range |
User units |
No default |
Sets the value of the absolute destination position. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Default (.Q) |
BOOL |
FALSE, TRUE |
N/A |
Returns TRUE when the function successfully executes. |
Remarks
- Returns TRUE if the function succeeded.
- See Axis Function Examples.
Position with Modulo On
-
- This information applies to both MLAxisAbs and MLMstAbs.
For simplicity, the term Axis Block also refers to Master Block.
When the Modulo is turned on, the Axis Block moves to the targeted position during the corresponding period![]() Motor systems having a reciprocating or oscillating motor that operates synchronously with the periodicity of the source which supplies the electrical energy.
The period of execution of a pipe is the time spent between two successive computations of set values for the same pipe. The period of execution of a pipe is specified by the PERIOD parameter of the input pipe block. and is calculated as:
Motor systems having a reciprocating or oscillating motor that operates synchronously with the periodicity of the source which supplies the electrical energy.
The period of execution of a pipe is the time spent between two successive computations of set values for the same pipe. The period of execution of a pipe is specified by the PERIOD parameter of the input pipe block. and is calculated as:
- If the Position input is between 0 (zero) and the Modulo position, the Axis Block moves within the current period (no position rollover).
- If the Position input is greater than the Modulo position, the Axis Block moves during one of the next period (positive position rollover).
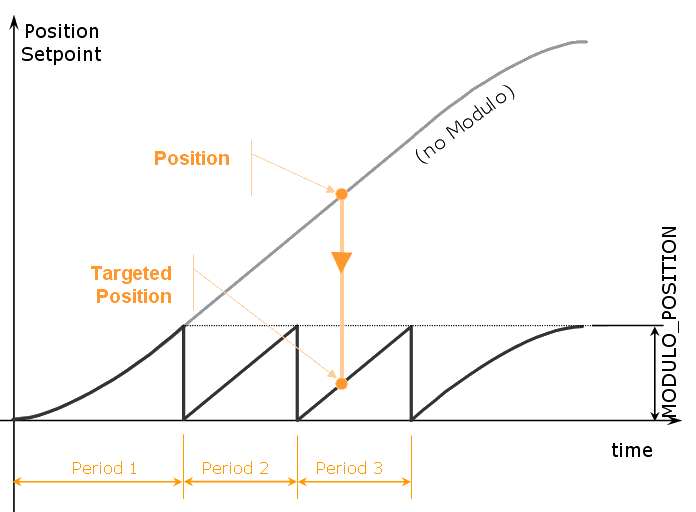
Figure 1: MLAxisAbs or MLMstAbs Modulo
The Axis Block works similarly for negative positions.
If the Position input is less than 0 (zero), the Axis Block moves during one of the previous period (negative position rollover).
Forcing the Direction of Rotation
In some applications, the direction![]() The orientation components of a vector in space. of rotation for the axis is forced in one direction only.
The orientation components of a vector in space. of rotation for the axis is forced in one direction only.
As a consequence, the motor![]() An actuator focused to a movement, converting electrical energy in a force or torque. movement goes to the next or previous modulo in these situations:
An actuator focused to a movement, converting electrical energy in a force or torque. movement goes to the next or previous modulo in these situations:
End Position is Less Than Start Position
If the End Position is less than the Start Position and the direction of rotation for the axis is forced to be clockwise, the red point shows when the Modulo position is reached.
See Row 2 of the MLAxisAbs.
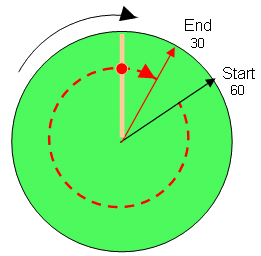
Figure 2: MLAxisAbs or MLMstAbs - End Position Less Than Start Position
End Position is Greater Than Start Position
If the End Position is greater than the Start Position and the direction of rotation for the axis is forced to be counter clockwise.
See Row 4 of the MLAxisAbs.
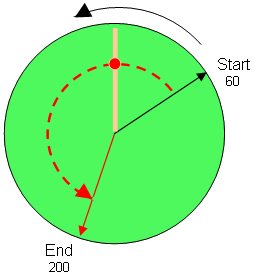
Figure 3: MLAxisAbs or MLMstAbs - End Position Greater Than Start Position
|
Start Position |
End Position |
Direction of Rotation |
Cross Modulo |
Position Input to MLAxisAbs (1) |
RelativeDistance Moved (2) |
|
|
60 |
200 |
Clockwise |
No |
200 |
140 |
(i.e., 200 - 60 + 0) |
|
60 |
30 |
Clockwise |
Yes |
390 |
330 |
(i.e., 30 - 60 + 360) |
|
60 |
30 |
Counter clockwise |
No |
30 |
-30 |
(i.e., 30 - 60 - 0) |
|
60 |
200 |
Counter clockwise |
Yes |
-160 |
-220 |
(i.e., 200 - 60 - 360) |
With:
(1) Position Input = End Position ( + Modulo * Direction of rotation)
(2) Relative Distance Moved = End Position - Start Position ( + Modulo * Direction of rotation)
Where:
Direction of rotation = 1 when clockwise and -1 when anti-clockwise.
Travel Speed Update with MLAxisAbs
The travel speed![]() Speed is the absolute value of the velocity without direction. of the generator can be updated using the function block
Speed is the absolute value of the velocity without direction. of the generator can be updated using the function block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. MLAxisGenWriteSpd.
A function block groups an algorithm and a set of private data.
It has inputs and outputs. MLAxisGenWriteSpd.
Depending on the state of the generator, this speed is directly reflected on the current move or a future move.
- If MLAxisAbs is not currently being executed, the new travel speed is applied for the trajectory
 Time dependent description of the path the TCP of an axes group moves along.
Additional to the geometrical description of the space curve, time dependent state variables like velocity, acceleration, jerk, forces etc. are specified. calculation for a future MLAxisAbs command.
Time dependent description of the path the TCP of an axes group moves along.
Additional to the geometrical description of the space curve, time dependent state variables like velocity, acceleration, jerk, forces etc. are specified. calculation for a future MLAxisAbs command. - If MLAxisAbs is currently being executed, and a new MLAxisAbs with the same target position is called, the new travel speed is taken into account only if the current state of the TMP Trapezoidal Motion Profile - This pipe block is a source block that frequently serves as a virtual master for a system composed of several pipes. Generally, a trapezoidal motion profile generator is used to generate a flow of values with a first derivative which produces a trapezoidal trajectory. profile is the constant velocity For a group of axes this means: In ACS the velocities of the different axes. In MCS and PCS it provides the velocity of the TCP or acceleration A change in velocity over time.
Because velocity is a vector, it can change in two ways: a change in magnitude and/or a change in direction.
In one dimension, acceleration is the rate at which something speeds up or slows down.
However, more generally, acceleration is a vector quantity expressing the change with time of the velocity both in magnitude and in direction.
See these Wikipedia articles for more information:
http://en.wikipedia.org/wiki/Velocity
http://en.wikipedia.org/wiki/Euclidean_vector
http://en.wikipedia.org/wiki/Rate_(mathematics).
- If the axis was decelerating to stop at the goal position the new travel speed is not taken into account.
- If a MLAxisAbs is currently being executed, and a new MLAxisAbs with a different target position is called, the new travel speed is taken into account.
Example 1
|
|
|
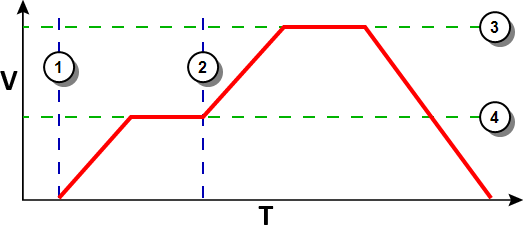
Figure 4: Initial speed is smaller than the new speed.
Example 2
|
|
|
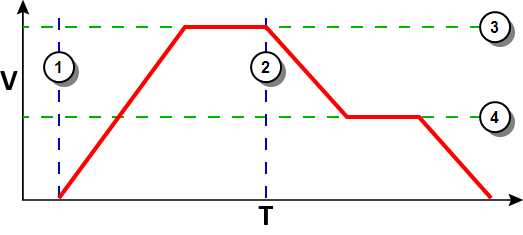
Figure 5: Initial speed is bigger than the new speed.
Example 3
|
|
|
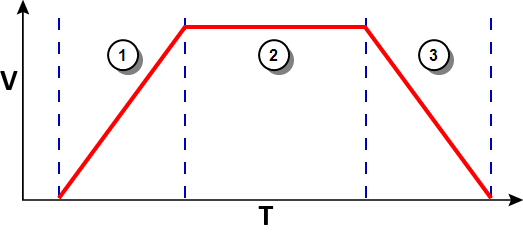
Figure 6: The speed update is taken into account only if the second MLAxisAbs is triggered during acceleration or constant velocity.
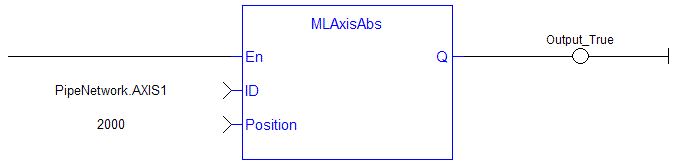
FBD Language Example

FFLD Language Example
IL Language Example
Not available.
ST Language Example
MLAxisAbs( PipeNetwork.Axis1, 2000 ) ;
See Also






