 Lageregler
Lageregler
Übersicht
Der Positionsregelkreis ist aktiv, wenn der Servoverstärker in der Betriebsart „Position“ (
Registerkarten im Fenster „Positionsregelkreis“
Die Ansicht des Positionsregelkreises enthält das obige aktive Blockdiagramm. Wird ein Block im Diagramm angeklickt, öffnet sich die entsprechende Registerkarte darunter.
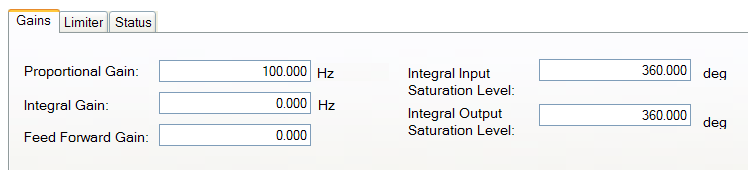
- Verstärkungen: Diese Registerkarte zeigt die Verstärkungen für den Positionsregelkreis an.
Element Beschreibung Befehl Proportionale Verstärkung Setzt die proportionale Verstärkung für den PID-Regelkreis des Lagereglers. PL.KP Integralverstärkung Stellt die integrale Verstärkung des PI-Regelkreises des Lagereglers ein. PL.KI Sättigung des Integraleingangs Begrenzt den Eingang des Positionsregelkreis-Integrators durch Einstellen der Eingangssättigung. PL.INTINMAX Sättigung des Integralausgangs Begrenzt den Ausgang des Positionsregelkreis-Integrators durch Einstellen der Ausgangssättigung. PL.INTOUTMAX Integratormodus Legt Folgendes für den Geschwindigkeitsmodus fest:
(missing or bad snippet)VL.KIMODE Integrator-Schwellenwert Legt den Schwellenwert für den Geschwindigkeitsbefehl fest, wenn sich der Positionsregelkreis-Integrator abschaltet. PL.KITHRESH Feed-Forward-Gewinn Legt die Verstärkung für die Geschwindigkeitsvorsteuerung fest (eine skalierte Ableitung des Positionsbefehls wird zum Geschwindigkeitsbefehlswert addiert) VL.KVFF - Befehl Vorfilter:
Element Beschreibung Befehl Filterzeit Legt die Periode eines "Boxcar"-Filters für den gleitenden Mittelwert für den Positionsbefehl fest. Wenn der Wert größer als 0 ist, ist der Filter aktiv. PL.FILTERTIME Eckfrequenz Legt die Frequenz eines Tiefpasses zweiter Ordnung für den Positionsbefehl der Trajektorie fest. Wenn der Wert größer als 0 ist, ist der Filter aktiv. AXIS#.PL.FILTER.FREQ Q-Wert Stellt den Dämpfungsparameter eines Tiefpasses zweiter Ordnung auf den Positionsbefehl der Trajektorie ein. AXIS#.PL.FILTER.Q 
- Befehl Vorfilter: Zeigt die Filterzeit an. Siehe PL.FILTERTIME.
-
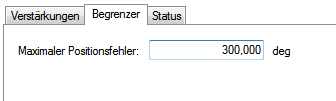
Begrenzer: Der Wert in der Box Maximum Position Error (PL.ERRFTHRESH ) begrenzt den Positionsfehler (PL.ERR ), der gegeben sein kann. Bei Überschreitung des maximalen Positionsfehlers gibt der Servoverstärker den Fehler F439 n439 (Schleppfehler) aus. Wenn der maximale Positionsfehler auf 0 (Vorgabewert) gesetzt ist, wird dieser ignoriert.
-
Quelle: Mithilfe dieses Reiters können Sie das gewünschte Feedback für den Positionsregelkreis auswählen (PL.FBSOURCE ). Siehe Feedback-Ansicht der Achse, um das gewünschte Feedback für den Positionsregelkreis zu konfigurieren und auszuwählen.

-
Status: Dieser Reiter zeigen den aktuellen Wert von befohlener Position (PL.CMD ), Positionsfeedback (PL.FB ), Positionsfehler (PL.ERR ) und Geschwindigkeitsbefehl (VL.CMD ).
Standardverhalten und Änderungen des Positionsregelkreises
Standardmäßig wird nur eine Proportionalverstärkung
Änderungen des Positionsregelkreises basierend auf Schiebereinstellung
Eine Einstellung des Schiebers (siehe Slider Tuning) dient zur Anpassung der Proportionalverstärkung für den Positionsregelkreis (sowie von Parametern im Bildschirm „Geschwindigkeitsregelkreis“; Geschwindigkeitsregelkreis). Wenn die Bandbreite mit dem Schieberegler eingestellt wird, wird bei der Rückkehr zum Positionsregelkreis-Fenster nur die proportionale Verstärkung geändert. Die Integral- oder Vorsteuerverstärkung wird durch den Schieber-Tuner nicht geändert. Wenn die Integralverstärkung auf 0 gesetzt ist, sind die integralen Sättigungspegel nicht anwendbar. In der Registerkarte Verstärkungen werden die entsprechenden Felder möglicherweise mit Vorgabewerten ausgefüllt, unabhängig davon, ob die Integralverstärkung auf 0 gesetzt ist.
Änderungen des Positionsregelkreises basierend auf dem PST
Wenn das automatische Tuning (Performance Servo Tuner (PST), siehe Verwendung des automatischen Tunings) im Autotune-Modus verwendet wird, erfolgen Änderungen der Proportional-, Integral- und Vorsteuerverstärkung des Positionsregelkreises sowie weiterer Parameter, die nicht direkt mit dem Bildschirm „Positionsregelkreis“ verknüpft sind. Die Änderungen sind abhängig von Servoverstärker, Motor und Last sowie den PST-Einstellungen.
Zugehörige Parameter







