 Geschwindigkeitsregelkreis
Geschwindigkeitsregelkreis
Übersicht
Der Geschwindigkeitsregelkreis ist aktiv, wenn der Servoverstärker in der Betriebsart „Geschwindigkeit“ (

Registerkarten im Fenster „Geschwindigkeitsregelkreis“
Die Geschwindigkeitsansicht enthält das obige aktive Blockdiagramm. Wird ein Block im Diagramm angeklickt, öffnet sich die entsprechende Registerkarte darunter.
-
Ramp Limiter: Legt die maximale Beschleunigung und Beschleunigungsgrenzen fest.

-
Geschwindigkeitsbegrenzung: Die Geschwindigkeitsbegrenzung wirkt sich auf die maximale Geschwindigkeit des Antriebs aus, wenn die Befehlsquelle Service (

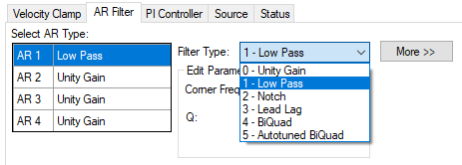
- AR-Filter: AR1, AR2, AR3 und AR4 sind die unabhängigen bilinearen quadratischen (bi-quad) Filter im Servoverstärker. AR1 und AR2 befinden sich im Vorwärtspfad und AR3 und AR4 im Rückführungspfad. Diese Bi-Quad-Filter können jeweils in fünf verschiedenen Modi konfiguriert werden.

- 0-Unity-Gain: Der Filter ist ausgeschaltet und hat keinen Einfluss auf den Kreislauf.
- 1-Tiefpass: In den Modi 1, 2 und 3 wird der Bi-Quad-Filter für die jeweilige Filterungsart konfiguriert. Das Feld „Parameter bearbeiten“ dient zur Einrichtung des Filters. Die Istwerte der BiQuad-Filter werden links angezeigt:

- 2–Notch
- 3-Vor-/Nacheilung
- 4-Bi-Quad : Ein manuell konfigurierter Bi-Quad-Filter. Hierbei handelt es sich um eine erweiterte Tuning-Funktion.
- 5-Autotuned Biquad : Wenn die PST einen Filter setzt, nachdem der PST-Prozess abgeschlossen ist, werden die Werte in den Bi-Quad-Filter eingegeben und als schreibgeschützte Werte angezeigt.
-
PI-Regler: Stellen Sie die Werte für die proportionale und integrale Verstärkung ein. Weitere Informationen finden Sie im Tuning Guide.
Die Indikatoren zeigen an, welcher Integrator gerade aktiv ist.

Element Beschreibung Befehl P-Verstärkung Stellt die proportionale Verstärkung der Geschwindigkeitsschleife ein. VL.KP I-Verstärkung Stellt die integrale Verstärkung der Geschwindigkeitsschleife ein. VL.KI Integratormodus Legt Folgendes bezüglich des Geschwindigkeitsmodus fest:
(missing or bad snippet)VL.KIMODE Integratorschwellenwert Legt den Schwellenwert für den Geschwindigkeitsbefehl fest, wenn sich der Integrator des Positionsregelkreises abschaltet. PL.KITHRESH - Beobachter: Dieser Reiter enthält Parameter, die relevant für den Status eines Beobachters sind.

- Beobachtermodus: Mit dieser Option wird der Betriebsmodus des Beobachters festgelegt. Wenn der Wert 0 ist, ist der Beobachter nicht Teil des Regelkreises, d. h. VL.FB wird als Geschwindigkeitsfeedbacksignal für den Geschwindigkeitsregelkreis verwendet. Wenn der Wert 1 ist, ist der Luenberger Beobachter Teil des Regelkreises; VL.MODEL wird als Geschwindigkeitsfeedbacksignal verwendet. Zugehöriger Befehl: VL.OBSMODE
- Beobachterverstärkung: Dieses Feld legt die Modellverstärkung des Geschwindigkeitsbeobachters fest. Dieser Wert stellt die Verstärkung der elektromechanischen Anlage des Systems dar. Das System hat einen hohen Gewinn, wenn es schnell und agil reagiert. Und diese Zahl wird hoch sein. Bei einem stark belasteten System mit einer großen Trägheitsabweichung reagiert das System nicht schnell und ist träge. Das bedeutet, dass der Wert dieser Option geringer ist.VL.KO
- Beobachterbandbreite: Dieses Feld legt die Bandbreite des Beobachters in Hz fest. Der Beobachter leitet das Geschwindigkeitfeedback durch einen PID-Regelkreis, der sich wie ein Tiefpassfilter mit einer Bandbreite dieses Wertes verhältVL.OBSBW.
- Quelle: Wählen Sie die Quelle für das Feedback des Geschwindigkeitsregelkreises. Zur Auswahl stehen "Wie bei Kommutierung" oder einer der Feedbacks.
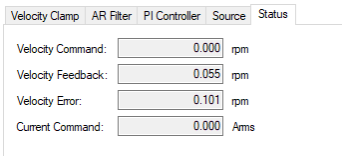
- Status: Der Statusreiter zeigt Parameter, die relevant sind für die Leistung des Geschwindigkeitsregelkreises.
Standardeinstellungen und Änderungen des Geschwindigkeitsregelkreises
Standardmäßig ist ein PI-Regelkreis mit einem Tiefpass-Filter (AR1) im Servoverstärker eingestellt.
Der Standardwert für den Tiefpassfilter ist 675 Hz. Der Tiefpass-Filter ist wichtig für die Unterdrückung von Störsignalen und verringert auch den akustischen Geräuschpegel des Systems.
Änderungen des Geschwindigkeitsregelkreises basierend auf Schiebereinstellung
Die Einstellung des Schiebers (siehe Slider Tuning) verwendet die Schiebersteuerung zur Anpassung der Werte für Proportional- und Integralverstärkung des Geschwindigkeitsregelkreises auf Basis der gewünschten Bandbreite. Wenn die Bandbreite mit dem Schieberegler eingestellt wird, werden bei der Rückkehr zum Geschwindigkeitsregelkreis-Fenster unterschiedliche Werte in den Feldern für die proportionale und integrale Verstärkung angezeigt. Bei Verwendung des Schiebereinstellers werden die Filter nicht automatisch geändert. Es werden die nur Ausdrücke für Proportional- und Integralverstärkung eingestellt.
Änderungen des Geschwindigkeitsregelkreises basierend auf dem PST
Wenn das PST (siehe Verwendung des automatischen Tunings) verwendet wird, erfolgen Änderungen der Proportional- und Integralverstärkung, der Filter des Geschwindigkeitsregelkreises sowie weiterer Parameter, die nicht direkt mit dem Bildschirm „Geschwindigkeitsregelkreis“ verknüpft sind. Die Änderungen sind abhängig von Servoverstärker, Motor und Last sowie den PST-Einstellungen. Die vom PST neu eingestellten Filter wechseln automatisch in den Modus 5-Autotuned BiQuad.
Vom PST eingestellte Filter im Modus 5- Autotuned BiQuad können nicht bearbeitet werden. Wenn nach Abschluss des PST Einstellungen am System-Tuning erfolgen sollen, müssen diese in den Einstellungen des PST vorgenommen werden. Anschließend kann der PST-Prozess wiederholt werden.
BiQuad Filter
Alle Filter sind digitale BiQuad Filter in den Servoregelkreisen. Tiefpass, LeadLag und Resonanz Filter sind von den folgenden Gleichungen abgeleitet. WorkBench übernimmt alle Berechnungen für den Nutzer. Geben Sie die Werte in die Felder des gewünschten Filtertyps ein.
BiQuad Filter als Tiefpass bei Frequenz F
Zähler Frequenz = 5000
Zähler Q = Sqrt(2)/2 (= 0.707)
Nenner Frequenz = F
Nenner Q = Sqrt(2)/2 (= 0.707)
BiQuad als LeadLag bei Frequenz F, Verstärkung G
Zähler Frequenz = F * 10^(-G/80)
Zähler Q = Sqrt(2)/2 (= 0.707)
Nenner Frequenz = F * 10^(G/80)
Nenner Q = Sqrt(2)/2 (= 0.707)
BiQuad als Resonator bei Frequenz F, Verstärkung G, Bandbreite Q
Zähler Frequenz = F
Zähler Q = 10^(-G/40) * Q
Nenner Frequenz = F
Nenner Q = 10^(G/40) * Q
Zugehörige Parameter
Zugehörige Themen







