![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data. It has inputs and outputs. - Writes velocity and acceleration override factors.
A function block groups an algorithm and a set of private data. It has inputs and outputs. - Writes velocity and acceleration override factors.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Enable |
BOOL |
0, 1 |
N/A |
No default |
Request to write the override factors. |
|
Axis |
AXIS_REF |
1, 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function.
|
|
VelFactor |
REAL |
0.0, 2.0 |
N/A |
No default |
Velocity override factor. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Enabled |
BOOL |
|
|
Indicates the override values have been written. |
|
Busy |
BOOL |
|
|
Indicates this function block is executing. |
|
Error |
BOOL |
|
|
Indicates an invalid input was specified. |
|
ErrorID |
INT |
|
|
Indicates the error if Error output is TRUE. See PLCopen Function Block ErrorIDs for more information. |
Remarks
- See Function Blocks - General Rules for more information about how inputs and outputs work.
- A change in the velocity override factor takes effect immediately on the active move.
- The velocity override factor is applied to the programmed velocity (of a MC_MoveAbsolute, MC_MoveAdditive, MC_MoveRelative, MC_MoveSuperimp, or MC_MoveVelocity function block) to determine the command velocity:
command velocity = programmed velocity * VelFactor
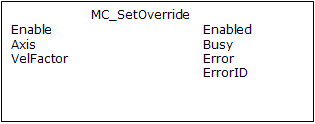
Figure 6-243: MC_SetOverride
FBD Language Example
Not available.
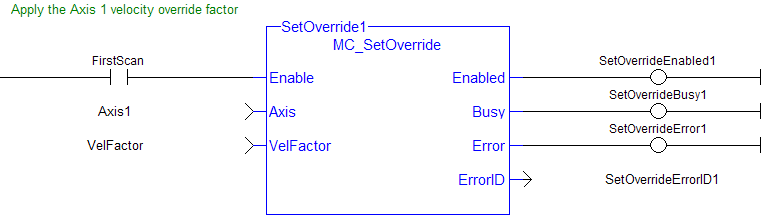
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* MC_SetOverride ST example *)
VelFactor := 1.25 ; //set the velocity factor to 1.25 (125%)
Inst_MC_SetOverride( TRUE , Axis1, VelFactor ); // Inst_MC_Setoverride is an instance of MC_SetOverride






