AXIS#.SAFEPARAM.SBC.BRAKETIMEDELAY
Description
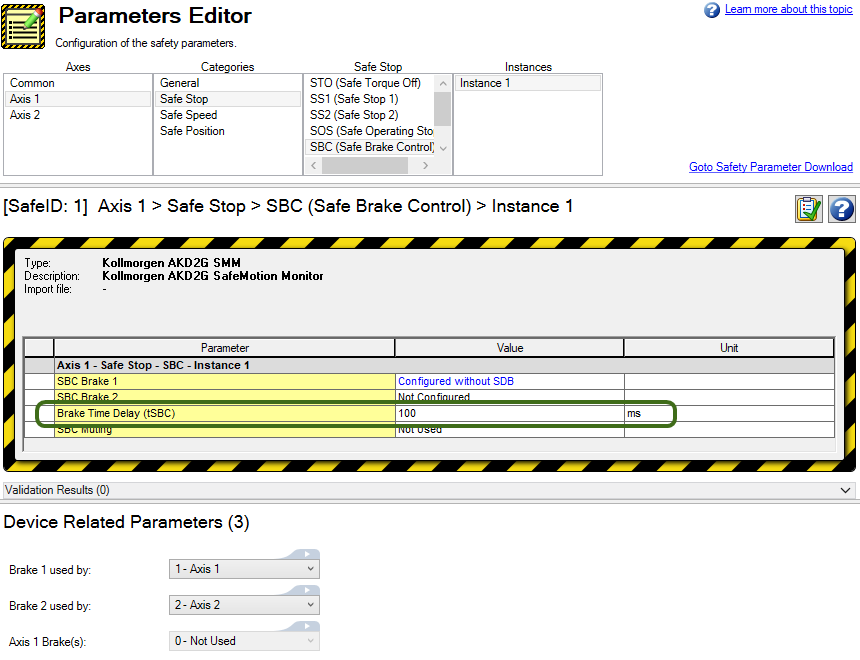
Indicates the delay required to apply the brake.
If the brake is configured without SDB (Safe Dynamic Brake) (brake before STO [Safe Torque![]() Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist Off]), the drive stays energized for the delay time once stopped to hold position and waits for the brake to apply before de-energizing the power stage.
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist Off]), the drive stays energized for the delay time once stopped to hold position and waits for the brake to apply before de-energizing the power stage.
If the brake is configured with SDB (brake simultaneously with STO), the delay time does not have any effect.
To ensure proper brake operation, this parameter should be the same or longer than the AXIS#.MOTOR.TBRAKEAPP
|
|
Ensure that the delay specified is enough time for the brake to fully engage. If an STO occurs prior to the brake fully engaged and the power stage is disabled, the axis load may fall. |

-
- Ensure that the delay specified is enough time for the brake to fully engage. If an STO occurs prior to the brake fully engaged and the power stage is disabled, the axis load may fall.
Context
For complete SBC information refer to SBC (Safe Brake Control).
Related safety parameters:
- AXIS#.SAFE.SBC.ACTIVE
- AXIS#.SAFEPARAM.SBC.BRAKExATTACHED
- AXIS#.SAFEPARAM.SBC.MUTINGSOURCE
- AXIS#.MOTOR.TBRAKEAPP
Versions
|
Action |
Version |
Notes |
|---|---|---|
|
Implemented |
02-01-02-000 |
|
General Information
|
Type |
Read/Write |
|
Units |
ms |
|
Range |
1-60,000 ms |
|
Default Value |
100 ms |
|
Data Type |
Integer |
|
Stored in Non-Volatile Memory |
No |
Fieldbus Information
|
Command |
Index |
SubIndex |
Data Type |
Units |
Float Scale |
Access |
|
|---|---|---|---|---|---|---|---|
|
AXIS1.SAFEPARAM.SBC.BRAKETIMEDELAY |
3156h |
03h |
Unsigned16 |
- |
- |
Read/Write |
No |
|
AXIS2.SAFEPARAM.SBC.BRAKETIMEDELAY |
3256h |
03h |
Unsigned16 |
- |
- |
Read/Write |
No |






