![]()
 Function Block - Performs a single-axis, non-ending move at a specified velocity.
Function Block - Performs a single-axis, non-ending move at a specified velocity.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
On the rising edge, request to queue the move. |
|
Axis |
AXIS_REF |
1 to 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function.
|
|
Speed |
LREAL |
Positive values. |
User unit/sec |
No default |
The target axis speed. Direction is specified by the Direction input parameter. |
|
Acceleration |
LREAL |
Positive values. |
User unit/sec2 |
No default |
Trapezoidal: Acceleration rate. S-curve: Maximum acceleration. |
|
Deceleration |
LREAL |
Positive values. |
User unit/sec2 |
No default |
Trapezoidal: Deceleration rate. S-curve: Unused. |
|
Jerk |
LREAL |
No range |
User unit/sec3 |
No default |
Trapezoidal: 0 (zero). S-curve: Constant jerk. |
|
Direction |
SINT |
0, 1 |
N/A |
No default |
|
|
BufferMode |
SINT |
|
N/A |
No default |
The specified buffer mode. See Buffer Modes for detailed information. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
InVelocity |
BOOL |
No range |
N/A |
Indicates the command velocity has reached the programmed velocity. |
|
Busy |
BOOL |
No range |
N/A |
High from the moment the Execute input is one-shot to the time the move is ended. |
|
Active |
BOOL |
No range |
N/A |
Indicates this move is the Active move. |
|
CommandAborted |
BOOL |
No range |
N/A |
Indicates the move was aborted. |
|
Error |
BOOL |
No range |
N/A |
Indicates either:
|
|
ErrorID |
INT |
No range |
N/A |
Indicates the error if Error output is TRUE. |
Remarks
-
- This function block starts a motion-related action and stores data for calculations and error checking.
If using a dual-core controller, see Call Function Blocks Multiple Times in the Same Cycle.
-
-
Consider using the MC_MoveContVel function block.
It is more flexible and allows for the continuous update of motion parameters.
- This type of move can be terminated with the MC_Halt function block or by aborting it with another move.
- See Function Blocks - General Rules about how inputs and outputs work.
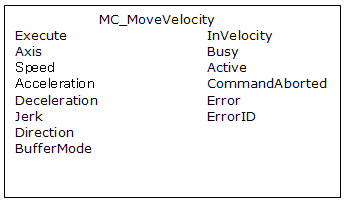
Figure 1: MC_MoveVelocity
Time Diagram
These images show two examples of the combination behavior of an MC_Stop FB with a MC_MoveVelocity FB.
- A rotating axis is ramped down with FB2 MC_Stop.
- The axis rejects motion commands as long as MC_Stop parameter “Execute” = TRUE.
- FB1 MC_MoveVelocity reports an error indicating the busy MC_Stop command.
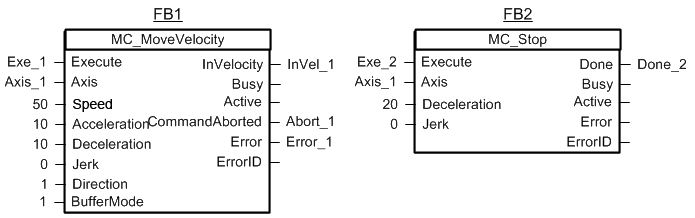
Figure 2: Time Diagrams: First and Second FBs
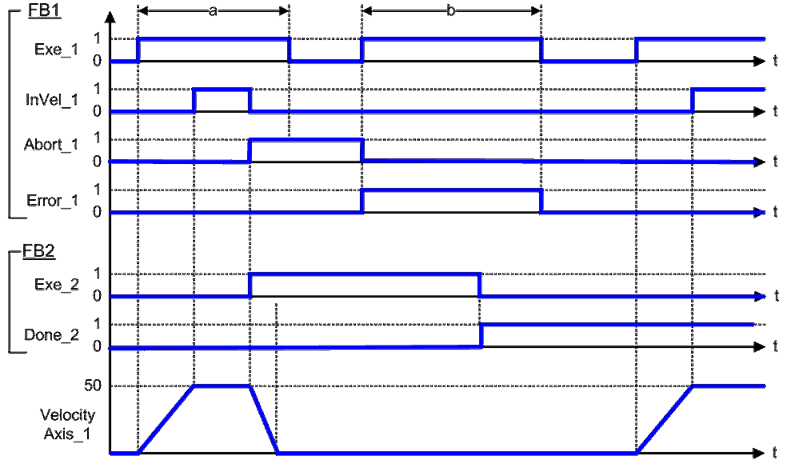
Figure 3: Time Diagram
FBD Language Example
Not available.
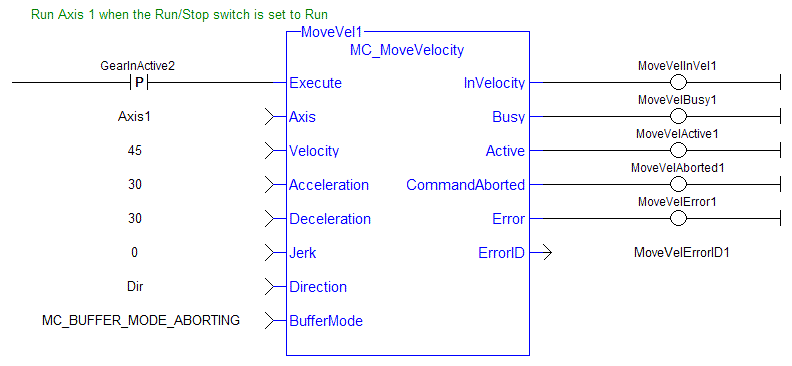
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* MC_MoveVelocity ST example *)
Inst_MC_MoveVelocity( MovVelReq , Axis1, 200.0, 100.0, 100.0, 0, True, MC_BUFFER_MODE_ABORTING );
See Also






