描述
PLS.UNITS 是一个确定驱动器中八个可用 PLS 行为的位变量。 此参数用于为 PLS 脉冲选择单位。
示例
| 位值 | 行为 |
|---|---|
|
0 位 = 0 基于位置的 PLS 操作。 |
当位置处于 PLS.P1 + PLS.WIDTH1 范围之内时,PLS.STATE 参数显示一个激活的 PLS 1 (PLS.P1 <= PL.FB <= PLS.P1+PLS.WIDTH1). 当参数 PLS.WIDTH1 已经设定为 0 值时,一旦 PLS.FB >= PL.P1,则此位将立即激活。 |
|
0 位 = 1 基于时间的 PLS 操作。 |
在跨越 PLS.P1 之后,PLS.STATE 参数显示一个激活 PLS 1 达 PLS.T1 ms。 |
|
7 位 = 0 基于位置的 PLS 操作。 |
当位置处于 PLS.P8 + PLS.WIDTH8 范围之内时, PLS.STATE 参数显示一个激活的 PLS (PLS.P8 <= PL.FB <= PLS.P8+PLS.WIDTH8)。 当参数 PLS.WIDTH8 已经设定为 0 值时,一旦 PLS.FB >= PL.P8,则此位将立即激活。 |
|
7 位 = 1 基于时间的 PLS 操作。 |
在跨越 PLS.P8 之后, PLS.STATE 参数显示一个激活 PLS 8 达 PLS.T8 ms。 |
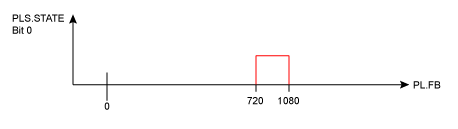
基于位置的连续 PLS 操作
PLS.P1 = 720
PLS.WIDTH1 = 360
PLS.UNITS 位 0(用于 PLS 1)= 低;PLS.T1 不考虑。
PLS.EN 位 0(用于 PLS 1)= 高
PLS.MODE 位 0(用于 PLS 1)= 低
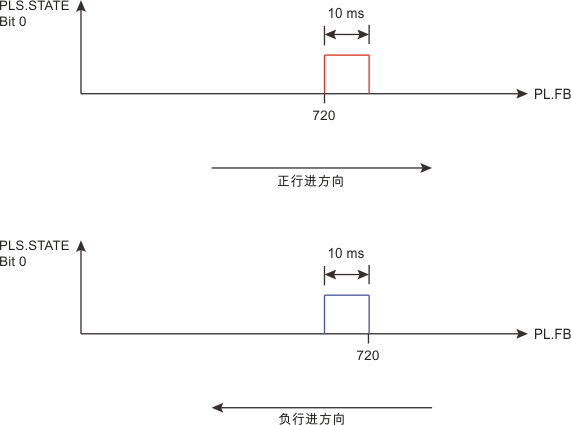
基于时间的 PLS 操作
PLS.P1 = 720
PLS.T1 = 10
PLS.UNITS 位 0(用于 PLS 1)= 低;PLS.WIDTH1 不考虑。
PLS.EN 位 0(用于 PLS 1)= 高
PLS.MODE 位 0(用于 PLS 1)= 低
一般信息
|
类型 |
读/写参数 |
|
单位 |
不适用 |
|
范围 |
0 至 255 |
|
默认值 |
0 |
|
数据类型 |
整数 |
|
另请见 |
PLS.EN, PLS.RESET, PLS.STATE, PLS.MODE, PLS.P1 至 PLS.P8{\f3 PLS.WIDTH1 }至 {\f3 PLS.WIDTH8}, PLS.T1 至 PLS.T8 |
|
起始版本 |
M_01-02-03-000 |
支持的型号
| 型号 | 支持 |
|---|---|
| AKD Base | 是 |
| 带位置 Indexer 的AKD | 是 |
| AKD EtherCAT | 是 |
| AKD CANopen | 是 |
| AKD BASIC | 是 |
| AKD SynqNet | 是* |
| AKD EtherNet/IP | 是 |
| AKD Profinet | 是 |
| AKD sercos® III | 是 |
| AKD-N | 是 |
| AKD-C | 否 |
*在 SynqNet 中,参数可能在固件中可用但对系统无影响。请参阅 SynqNet 支持的参数。
现场总线信息
如果您的驱动器类型位于受支持列表中,但未列出索引、地址或实例号,则可通过 WorkBench 而不是现场总线类型访问此参数。
|
现场总线 |
索引/子索引 |
对象起始版本 |
|---|---|---|
|
EtherCAT COE 与 CANopen |
34A4h/0 |
M_01-02-03-000 |
|
现场总线 |
地址 |
属性 | 有符号? |
|---|---|---|---|
|
Profinet |
2337 |
字节 | 否 |
| sercos® III | 2个八位字节 |
| 现场总线 | 实例 | 数据大小 | 数据类型 |
|---|---|---|---|
| 以太网/IP | 338 | 1 字节 | 整数 |
|
现场总线 |
索引/子索引 |
为 64 位? | 属性 | 有符号? |
对象起始版本 |
|---|---|---|---|---|---|
|
Modbus |
674 |
否 | 8 位 | 否 |
M_01-03-00-000 |
相关主题