Übersicht
Die Positionserfassung ermöglicht eine genaue Bestimmung der Motorposition (bzw. der Verstärker-Taktzeit) zum Zeitpunkt der Auslösung eines spezifischen Ereignisses. Der AKD Servoverstärker verwendet zwei unabhängige Erfassungen mit sich ähnelnder Funktionsweise.
Die Positionserfassung kommt in Präzisionsumgebungen zum Einsatz, in denen sich der Motor möglicherweise mit hoher Drehzahl bewegt und Sie bei einer E/A-Auflösung wissen müssen, wo genau sich der Motor bei Auftreten des Ereignisses befand. Referenzfahrt-Algorithmen verwenden häufig die Positionserfassung.
Sie erfasst die Motorposition (bzw. die Verstärker-Taktzeit), wenn der Erfassungs-Trigger aktiviert wird. Die Positionserfassung benötigt weniger als 3 Mikrosekunden Signalwechsel am Eingang. Verwenden Sie daher die Hochgeschwindigkeitseingänge 1 oder 2 mit abgeschalteten Filtern. Der Erfassungsschaltkreis ist für eine erneute Erfassung innerhalb vonweniger als 62,6 Mikrosekunden bereit. Der Erfassungsschaltkreis liefert präzisere Erfassungsresultate als bei Verwendung des Oszilloskop- oder Recorder-Takts.
Konfiguration der Positionserfassung
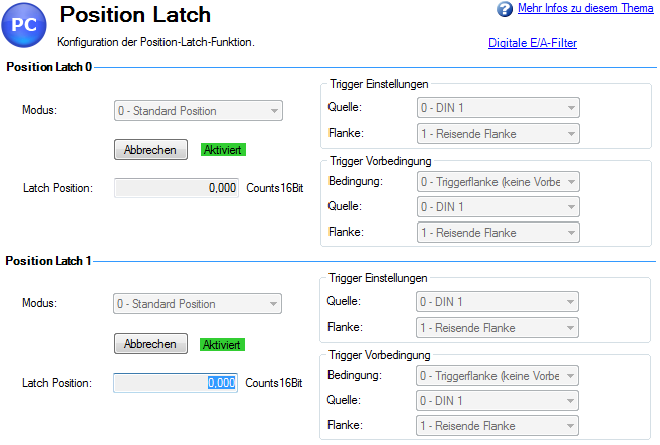
Wählen Sie zur Konfiguration der Positionserfassung die aus der Gruppe Einstellungen die Option Positionserfassung:
Einstellung der Erfassungsquelle (CAP0.FBSOURCE, CAP1.FBSOURCE)
CAP0.FBSOURCE und CAP1.FBSOURCE wählen die Quelle des Erfassungswertes. Daten für alle Quellwerte werden mit CAP0.PLFB, CAP1.PLFB abgerufen.
|
Wert |
Beschreibung |
|---|---|
|
0 |
Erfassung von Feedback 1 (FB1), unabhängig vom Wert für PL.FBSOURCE. Die Einheit ist dieselbe wie für PL.FB. |
|
1 |
Erfassung von Feedback 2 (FB2). |
|
2 |
Erfassung von Feedback 3 (FB3). |
|
3 |
Standard Positionserfassung, speichert PL.FB . Die Feedback Nummer wird bestimmt mit PL.FBSOURCE . |
| 4 | Erfassung von EXTENCODER.POSITION (nur AKD BASIC Servoverstärker). |
Einstellung der Erfassungsquelle (CAP0.TRIGGER, CAP1.TRIGGER )
Die Triggerquelle bestimmt, welcher Eingang am Servoverstärker die Positionserfassung startet.
| Option | Beschreibung |
|---|---|
| 0 - 6 | Diese Optionen triggert an Digitaleingang 1 bis 7. |
| 7- 9 | Diese Optionen triggert an RS485 Eingang 1 bis RS485 Eingang 3 des Steckers X9. |
| 10 | Diese Option triggert am Nullimpuls des primären Encoders. |
Einstellung der Erfassungsmodus (CAP0.MODE, CAP1.MODE )
Der Erfassungsmodus bestimmt, welche Informationen bei Auslösung der Erfassung im Servoverstärker gespeichert werden.
| Option | Beschreibung |
|---|---|
|
0 – Standard Position |
Erfasst die Motorposition in Verstärkereinheiten. |
|
1 – Drive Internal Time |
Erfasst die Triggerzeit in ns. |
|
2 – Distributed Clock Time |
Erfasst die Netzwerk (Ethercat) Lieferzeit. |
|
3 – Primary Encoder Signal |
Erfasst die Motorposition bei Auslösung am primären Encoder Nullimpuls. Dieser Modus wird nach jeder Auslösung automatisch wieder neu aktiviert. |
Wenn 0 - Standard Position oder 3 - Primary Encoder Signal gewählt ist, kann es zu Verzögerungen im Zusammenhang mit digitalen oder interpolierten Rückführeinheiten kommen.
Setzen und Abfragen des Erfassungswerts (CAP0.T, CAP1.T )
CAP0.EN setzt (aktiviert) die Erfassung und CAP0.T ruft den Erfassungswert ab. Nach erfolgter Konfiguration der Erfassung müssen Sie sie setzen, bevor eine Auslösung erfolgen kann. Klicken Sie auf Setzen (1), um die Erfassung zu aktivieren.
Wenn die Erfassung aktiviert ist, wird bei Auslösung der erfasste Wert unter der Setzen-Schaltfläche (2) angezeigt.
Einstellung der Erfassungsflanke (CAP0.EDGE, CAP1.EDGE )
Die Erfassungsflanke bestimmt, welche Änderung des Eingangsstatus die Erfassung auslöst.
| Option | Beschreibung |
|---|---|
|
1 – Steigende Flanke. |
Löst eine Erfassung aus, wenn das Eingangssignal von Low auf High wechselt. |
|
2 – Fallende Flanke |
Löst eine Erfassung aus, wenn das Eingangssignal von High auf Low wechselt. |
|
3 – Beide Flanken. |
Löst bei jeder Statusänderung des Eingangssignals eine Erfassung aus. |
Einstellen des Vorbedingungs-Ereignisses: (CAP0.EVENT, CAP1.EVENT )
Das Vorbedingungs-Ereignis gewährt dem Benutzer mehr Flexibilität beim Festlegen der Voraussetzungen für die Erfassungsauslösung.
| Ereignis-Optionen: | Beschreibung |
|---|---|
|
0 – Keine Vorbedingung. |
Die Erfassung wird ausgelöst, sobald die Erfassungsflanke auftritt. |
|
1 – Trigger-Flanke nach Vorbedingung. |
Die Erfassung wird nur ausgelöst, wenn die Vorbedingung vor der Erfassungsflanke auftritt. |
|
2 – Triggerflanke während Vorbedingung = 1. |
Die Erfassung wird nur während der Auswertung der Vorbedingung ausgelöst und ist wahr, während die Erfassungsflanke auftritt. |
|
3 – Triggerflanke während Vorbedingung = 0. |
Die Erfassung wird nur während der Auswertung der Vorbedingung ausgelöst und ist falsch , während die Erfassungsflanke auftritt. |
Einstellen einer Vorbedingung für komplexe Erfassung
Einstellen des Vorbedingungs-Flanke: (CAP0.PREEDGE, CAP1.PREEDGE )
Die Vorflanke bestimmt, welche Änderung des Eingangsstatus die Vorbedingung auslöst. Die Funktionsweise dieser Option ist mit derjenigen der oben beschriebenen Erfassungsflanke identisch.
Einstellen der Vorbedingungs-Auswahl: (CAP0.PRESELECT, CAP1.PRESELECT )
Die Vorauswahl legt fest, welche Eingangsquelle die Vorbedingung auslöst (basierend auf den Einstellungen für Vorflanke und Vorfilter). Die Funktionsweise dieser Option ist mit derjenigen der oben beschriebenen Erfassungsquelle identisch.
Kollmorgen Testberichte
Positionerfassung Testbericht basierend auf Leistungstest durch Kollmorgen:
Präzision der Erfassung mit externem Sensor
Servoverstärker: AKD-T00306-NBAN-000
Motor: AKM-21C
Feedback Typ: Inkrementeller Encoder mit 2048 Strichen
Digitaler Eingang: DIN1 (Hochgeschwindigkeits Eingang)
DIN1.FILTER = 0 (sehr wichtig den Filter auf 0 zu setzen, damit keine Verzögerung der Systemantwort auftritt)
Sensor : IDC Typ RP1 direkt auf der Motorwelle montiert. Üblicher industrieller Endschalter.
MOVE.RUNSPEED = 1000 U/min
Mit der oben angegebenen Motorgeschwindigkeit und aktivierter Erfassung konnte der Servoverstärker die Position innerhalb 30-70 counts Genauigkeit erfassen (0,17 - 0,40°) oder 27,5 – 64,0 µs.
Präzision der Erfassung mit internem Index des Encoders
Servoverstärker: AKD-T00606-NBAN-000
Motor: AKM22G
Feedback Type – Incremental Encoder 2048 lines
MOVE.RUNSPEED = 1000 U/min
Mit der oben angegebenen Motorgeschwindigkeit und aktivierter Erfassung konnte der Servoverstärker die Position innerhalb 10-20 counts Genauigkeit erfassen (0,05 - 0,11°) oder 9,5 – 18,0 µs.
Zugehörige Parameter







