Your Autorun feature may be deactivated. Open an Explorer window to see the autorun.exe file and use the Run command in the contextual menu to manually start the installer.
Your Autorun feature may be deactivated. Open an Explorer window to see the autorun.exe file and use the Run command in the contextual menu to manually start the installer.
A side effect with some remaining files that were not deleted properly can interfere with your new project. To fix this issue:
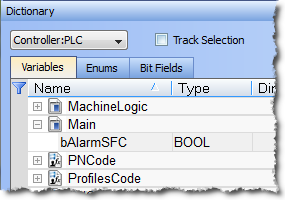
When you want to check the maximum time execution for an SFC"Sequential function chart" It can be used to program processes that can be split into steps. The main components of SFC are: - Steps with associated actions - Transitions with associated logic conditions - Directed links between steps and transitions step, you have to program this action based on the SFC alarm capability.
To show this status, you have to:
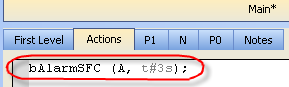
The syntax is explained here.
More details on the timeout on an SFC step are also given here.
If you open a project containing a link on a library which is no longer available, a warning is displayed. To fix this issue, refer to What happens when a library no longer exists?
As depicted in figures found in Different Implementations, the fieldbus serially links all the drives to the industrial PCPersonal Computer.
When the KAS IDE"Integrated development environment" An integrated development environment is a type of computer software that assists computer programmers in developing software. IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger is used to deploy an automation system on a master drive (also known as programmable drive), the fieldbus serially links all the drives to the master drive.
No. As with every real-time Industrial EthernetEthernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) system, one device (the master) has to be in charge of the network management and organize the Medium Access Control. With EtherCATEtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs, Slave-to-Slave communication is supported in two ways:
Since EtherCAT is so much faster than competing systems, slave-to-slave communication using two cycles is faster, too.
The maximum number of node addresses is 65,535. Typically, the number of the nodes on the network will be limited by the maximum EtherCAT frame size, which is 1500 bytes. Please see the FrameIn networking dialect, a message is called a frame Size in the EtherCAT Master Settings for more details.
As described in Communication and Fieldbus, KAS can communicate with outside world through Ethernet, CANopen, DeviceNetDeviceNet is a communication protocol (based on Controller Area Network) used in the automation industry to interconnect control devices for data exchange. Typical applications are information exchange, safety devices, and large I/O control networks.
Depending on the number of AKD drives physically present in the EtherCAT network, the KAS IDE might slow down when getting data.
The KAS RuntimeIn computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running is not concerned with this limitation.
If you need to rely on SDO communication to set the parameter of an EtherCAT device, you can do this with the ECATWriteSdo FB (see alsoEtherCAT Library).
Being asynchronous and based on the EtherCAT mailbox, the SDO communication is not deterministic. So the EtherCAT master uses a polling mode to ensure the SDO command is completed. Note that in operational mode, this polling is performed every 50 cycles 1To avoid overloading the controller, this rate is set according to the communication load, as well as the duration the AKD takes to process commands . As a consequence, you can expect the acknowledgement of your SDO command usually before less than 100 ms. So, a good practice is to set the update rate for SDO communication in your PLC application each 25 cycles.
EtherCAT Motion Bus Concepts for more details.
This issue occurs when you perform the following
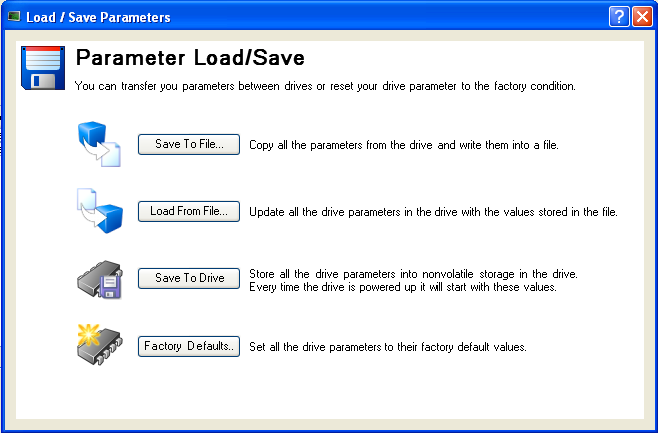

Reason
If you set the drive to its default parameters, then all the AKD parameters are restored and the unique ID (FBUS.PARAM03) used to identify the drive is lost.
Solution
You have to perform a new scan operation after setting the parameters to its default values
You can also clear the Write a unique ID option in the XML"Extensible Markup Language " XML is a general-purpose markup language. It is classified as an extensible language because it allows its users to define their own tags configuration tab (for more details, ENI File tab)
If you encounter any security issues during execution of Kollmorgen Automation Suite, refer to your IT department to set your proxy properly.
You may have to define your firewall settings to allow accessing the IP addresses used by KAS (for instance, IP address of the target system, or localhost IP address for the KAS Runtime Simulator: 127.0.0.1).
Port numbers have to be set properly in your firewall settings to avoid any trouble during communication, such as when downloading the application to the target, or plugging a probe to the softscope. Kollmorgen strongly recommends opening port numbers over 1024, as well as the range 502 to 520.
The Fast InputThe inputs are taken into account at each cycle depending on the system periodicity (for example each millisecond). Under certain circumstances this can be insufficient when more accuracy is needed, or if a quick response is required from the system. To fill the gap, a drive may have some Fast Input connections (generally one or two). When an event happens that triggers a Fast Input (e.g. when a sensor sends a rising edge), the detection of a signal occurs faster (which can be 1000 times more accurate than the system periodicity). Then the timestamp associated with this input can be provided to the IPC to take corrective action allows an application to get information about the occurrence of an external event at a higher resolution than the cycle time.
There are two kinds of feedback:
With a S300"Servostar 300 drive" See Servo Drive in Glossary drive you can use a resolver for primary feedback.
If a secondary feedback is required with your S300 drive, you can use a BiSS"Bi-directional Serial Synchronous interface" An open-source communication protocol for feedback devices. With BiSS, all of the computation for interpolation in regard to position occurs on the ASIC directly in the encoder feedback deviceA process whereby some proportion of the output signal of a system is passed (fed back) to the input. In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position.
If you use the same setup with an S300 drive, the S300's EXTPOS parameter has to be set to -11.
IMPORTANT: do not omit the negative sign!
To access secondary feedback, use a SAMPLER Pipe Network block. To configure the block use the MLSmpConPNAxis, MLSmpConPLCAxis, or MLSmpConECAT functions.
Current drives that support torqueTorque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist feed-forwardThis describes an element or pathway within a control system which passes a controlling signal from a source in the control system's external environment, often a command signal from an external operator, to a load elsewhere in its external environment are: S300 and AKD drives.
To use torque feed-forward, you have to rely on a CONVERTER Pipe Network block. To configure the block use the MLCNVConnectEx function. The arguments must be:
For more details, refer to the three following links:
If I measure a number e.g. 500 as an input at the Convertor block which is connected with the PDO object (Additive TorqueTorque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist Value 0x60B2), how many Amps are fed in the current loop at the AKD?
Current loop feed-forward value = Rated current x IL.KBUSFF x input at converter block / 1000
For example, with an AKD where:
| Rated current | 3A |
| IL"Instruction list" This is a low-level language and resembles assembly.KBUSFF | 1.0 |
| Additive Torque (PDO object) | 500 units |
Then
IL.FF = 3 x 1.0 x 500 / 1000 IL.FF = 1.5A
This number is mainly dependent upon the application and your PC's computing power. An average number would be 20 axes/ms
There is no limitation with the cams, the number of cams, the number of cam points, etc.. The limitation is only given by the processing power of your PC.
Pipe Blocks Description for more details.
Yes, I/O points represent the state of real world values.
This procedure allows you to determine if your controller is overloaded due to the PLC program or motion system load.
You can use the Softscope and the Trace Times button to display the following CPU loads:
To view the load, do as follows:
This item is explained here
If you are unable to log into the controller's webpage using a valid user ID and password, the controller's file system may be corrupt. To recover the system you will need to use the push buttons on the controller (see Booting from the Recovery Image) to recover the system.
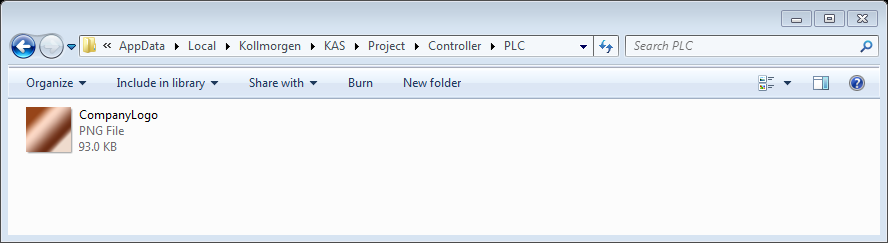
Graphics need to be made portable with a project, otherwise the KAS IDEwill attempt to point to the original location of the graphic files. To make graphics portable, copy them to c:\Users\[user folder]\AppData\Local\Kollmorgen\Project\Controller\PLC. After this the graphics are a part of the .KAS file.
The documentation is embedded in Kollmorgen Automation Suite package in e-format.
The system needs to know where to place the copied blocks. Press Ctrl-V then use the mouse to point to where you want the copied blocks to be pasted.
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |
|