MLFB_HomeFindHomeInput
![]()
 Function Block - Homing to a home switch.
Function Block - Homing to a home switch.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
ibExecute |
BOOL |
FALSE, TRUE |
N/A |
No default |
Start homing, edge-triggered. |
|
iAxisID |
DINT |
|
|
|
ID of the axis block of the Pipe Network. |
|
iPosition |
LREAL |
|
|
|
Reference position. |
|
ibDirection |
BOOL |
0, 1
|
N/A |
No default |
Defines the axis homing direction.
|
|
iVelocity |
LREAL |
|
|
|
Reference speed. |
|
iAcceleration |
LREAL |
|
|
|
Reference acceleration. |
|
iDeceleration |
LREAL |
|
|
|
Reference deceleration. |
|
ibHomeInput |
BOOL |
|
N/A |
No default |
Home input, high-active. |
|
ibPosLimitSwitch |
BOOL |
|
N/A |
No default |
Positive limit switch, high-active. |
|
ibNegLimitSwitch |
BOOL |
|
N/A |
No default |
Negative limit switch, high-active. |
|
iTimeout |
TIME |
|
|
|
Time monitoring (T#0ms: off). |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
obDone |
BOOL |
FALSE, TRUE |
N/A |
Done bit. |
||||||||||||
|
obActive |
BOOL |
FALSE, TRUE |
N/A |
Active bit. |
||||||||||||
|
obError |
BOOL |
FALSE, TRUE |
N/A |
Error bit. |
||||||||||||
|
oErrorID |
DINT |
|
N/A |
Error identifier:
|
Remarks
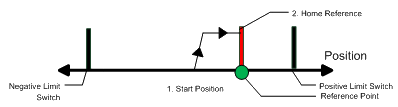
- The motor starts to move according to the direction setting.
- The home position has been found as soon as the home-switch becomes active during a motion in direction of the direction setting.
- The hardware limit switches are monitored during the homing procedure.
- The drive behaves this way in case a hardware limit switch is active before the home-switch has been activated:
The motor changes the direction until the home switch is crossed. - The motor ramps down to 0 (zero) velocity and reverses direction again after crossing the home-switch.
- The home-switch is now activated according to the direction setting and the home-position has been found.
- The command position of the drive is immediately set to the position value and the motor ramps down to 0 (zero) velocity.
FBD Language Example
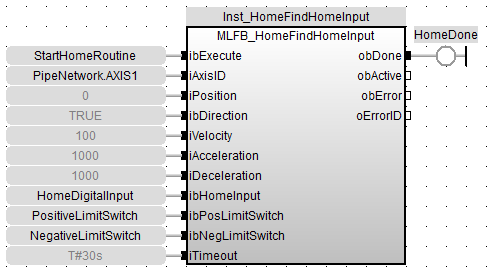
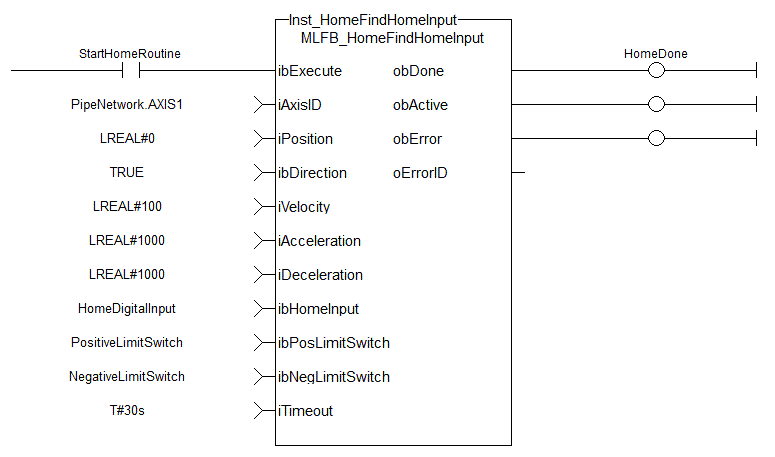
FFLD Language Example
IL Language Example
Not available.
ST Language Example
//Call homing function on Axis1 with preset velocity, accel, and decel values
//Start in negative direction, change if limit switch seen before home switch
//after seeing home switch, set axis position to zero
Inst_MLFB_HomeFindHomeInput( StartHomeRoutine,
PipeNetwork.AXIS1,
0,
TRUE,
100,
1000,
1000,
HomeDigitalInput,
PositiveLimitSwitch,
NegativeLimitSwitch,
T#30s ); HomeDone := Inst_MLFB_HomeFindHomeInput.obDone;
See Also






