MLFB_HomeFindHomeInputThenZeroAngle
![]()
 Function Block - Homing to a home switch plus zero angle.
Function Block - Homing to a home switch plus zero angle.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
ibExecute |
BOOL |
FALSE, TRUE |
N/A |
No default |
Start homing, edge-triggered. |
|
iAxisID |
DINT |
|
|
|
ID of the axis block of the Pipe Network. |
|
iPosition |
LREAL |
|
|
|
Reference position. |
|
ibDirection |
BOOL |
0, 1
|
N/A |
No default |
Defines the axis homing direction.
|
|
iVelocity |
LREAL |
|
|
|
Reference speed. |
|
iAcceleration |
LREAL |
|
|
|
Reference acceleration. |
|
iDeceleration |
LREAL |
|
|
|
Reference deceleration. |
|
ibHomeInput |
BOOL |
|
N/A |
No default |
Home input, high-active. |
|
ibPosLimitSwitch |
BOOL |
|
N/A |
No default |
Positive limit switch, high-active. |
|
ibNegLimitSwitch |
BOOL |
|
N/A |
No default |
Negative limit switch, high-active. |
|
iTimeout |
TIME |
|
|
|
Time monitoring (T#0ms: off). |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
obDone |
BOOL |
FALSE, TRUE |
N/A |
Done bit. |
||||||||||||
|
obActive |
BOOL |
FALSE, TRUE |
N/A |
Active bit. |
||||||||||||
|
obError |
BOOL |
FALSE, TRUE |
N/A |
Error bit. |
||||||||||||
|
oErrorID |
DINT |
|
N/A |
Error identifier:
|
Remarks
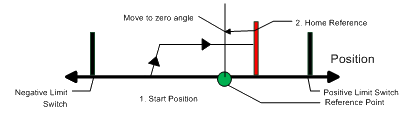
- Similar to the Find Home Limit method.
- The find input home then find zero angle.
- Mode follows the same steps, but upon completion of the move, it continues to move to find the zero angle reference of the motor.
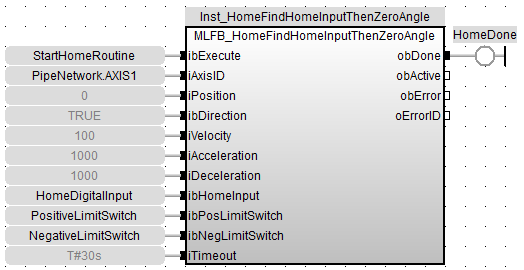
FBD Language Example
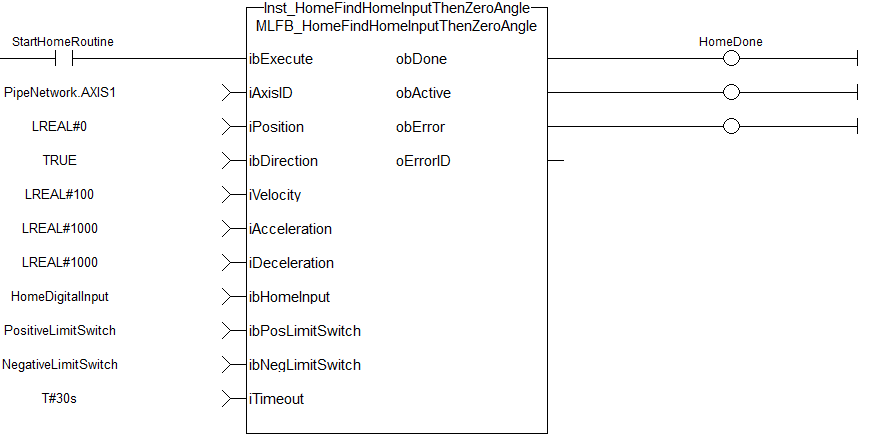
FFLD Language Example
IL Language Example
Not available.
ST Language Example
//Call homing function on Axis1 with preset velocity, accel, and decel values
//Start in negative direction, change if limit switch seen before home switch
//after seeing home switch and moving to zero angle, set axis position to zero
Inst_MLFB_HomeFindHomeInputThenZeroAngle( StartHomeRoutine,
PipeNetwork.AXIS1,
0,
TRUE,
100,
1000,
1000,
HomeDigitalInput,
PositiveLimitSwitch,
NegativeLimitSwitch,
T#30s );
HomeDone := Inst_MLFB_HomeFindHomeInputThenZeroAngle.obDone;
See Also






