Master
Function by Types
|
Motion Control |
Inquiry Functions |
Position Setting |
|---|---|---|
|
|
Functions in Alphabetical Order
|
Name |
Description |
|---|---|
|
Performs a move to an absolute position. |
|
|
Performs a move for a specified distance relative to the endpoint of the previous move. |
|
|
Forces the position of a Master Block to a specified position. |
|
|
Initializes a Master TMP generator block. |
|
|
Gets the present acceleration value of a master block. |
|
|
Gets the present deceleration value of a master block. |
|
|
Gets the initial position of a master block. |
|
|
Gets the speed of a master block. |
|
|
Performs a relative move for a specified distance from the current position. |
|
|
Jogs at the specified speed. |
|
|
Returns the status of the generator. |
|
|
Sets the acceleration of a master block. |
|
|
Sets the deceleration of a master block. |
|
|
Sets the initial position of a master block. |
|
|
Sets the speed of a master block. |
Purpose
In contrast to the independent axes approach, synchronized axes must have something to put them in synchronization.
- This is the main goal of the Master pipe block which contains a Trapezoidal Motion Profile (TMP) generator, which gives the cadence to the machine.
- It starts, stops and runs the machine at the desired speed.
The TMP Generator provides linear acceleration and deceleration, and also constant speed operation.
- These values are pure logical values, with generally no direct physical representation.
- It is a source block which frequently serves as a virtual master for a system comprised of several pipes.
- A TMP Generator may be commanded to produce a movement of specified length (distance), or to accelerate to setpoint rate and operate at that rate until commanded to operate at a different rate.
- Acceleration and deceleration rates are also specified by the application.
Parameters
|
Parameter |
Description |
|---|---|
|
Acceleration |
|
|
Deceleration |
|
|
InitialPosition |
|
|
Modulo |
The available modes are:
|
|
ModuloPosition |
Modulo Position for cyclic motion systems expressed in user logical units (Position Rollover Value). |
|
SamplingPeriod |
|
|
TravelSpeed |
|
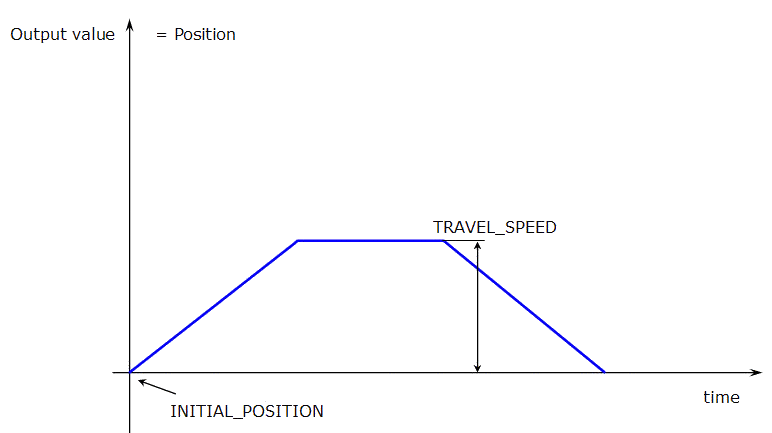
Figure 1: TMP Parameters: INITIAL_POSITION and TRAVEL_SPEED
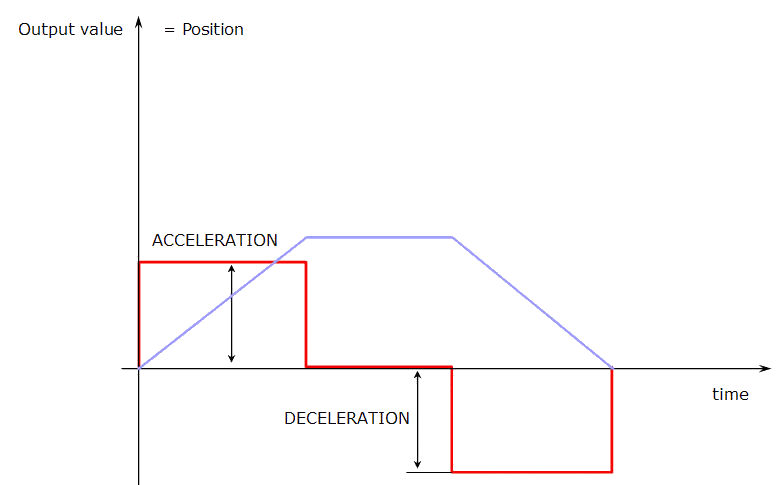
Figure 2: TMP Parameters: ACCELERATION and DECELERATION
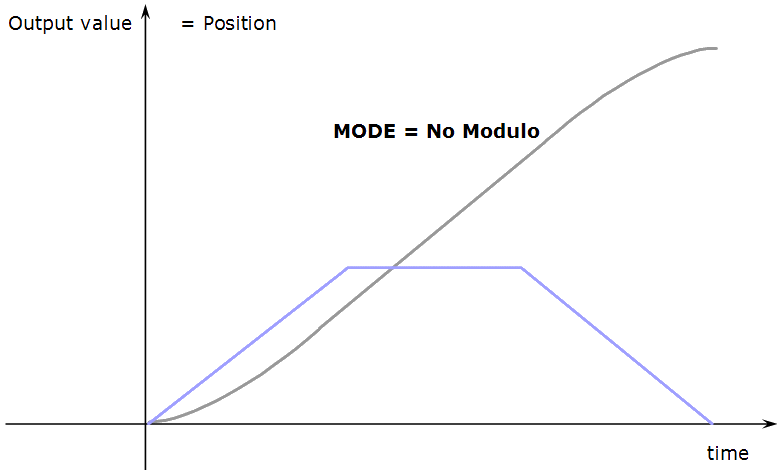
Figure 3: TMP Parameters: MODE No Modulo
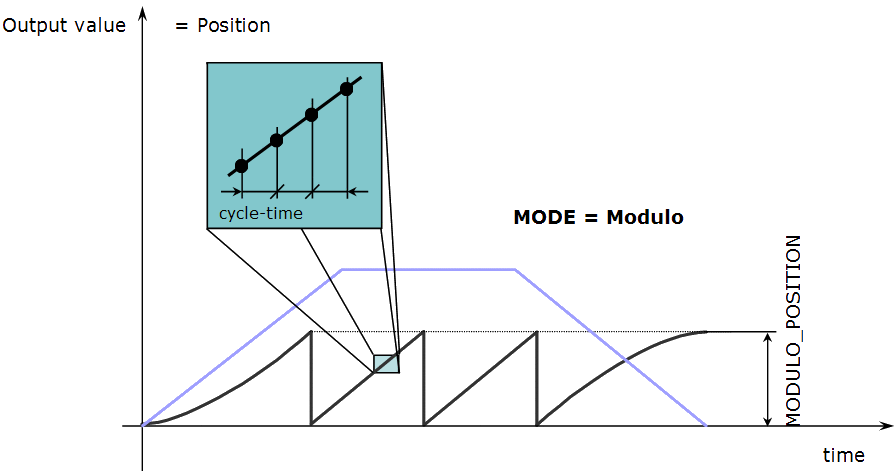
Figure 4: TMP Parameters: MODE Modulo and MODULO_POSITION
Examples: Master Function
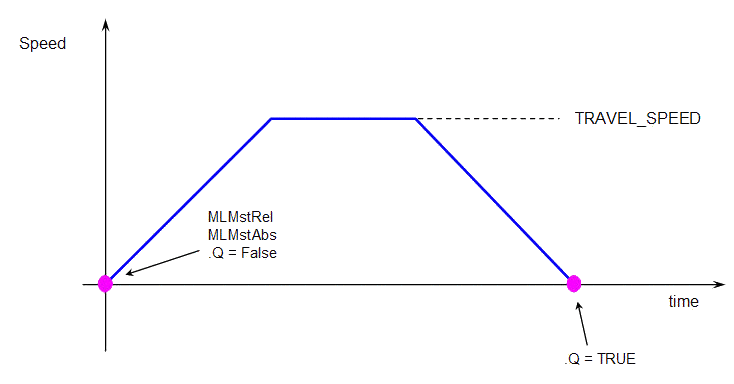
Figure 5: MLMstRun(0.0) reduce the speed down to 0.
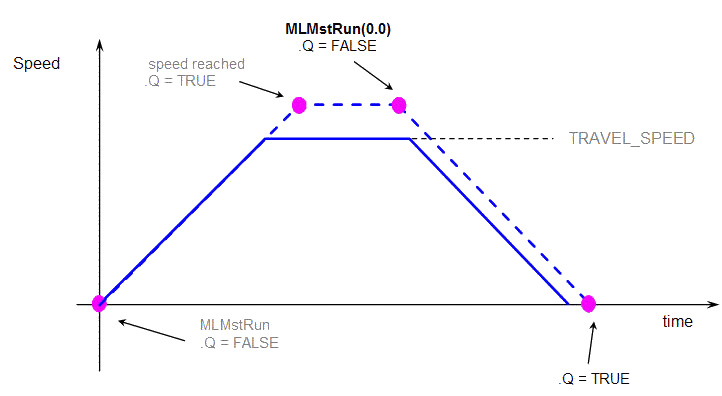
Figure 6: Master Functions Usage
Associated Data
- OutputValue: Output value of the data flows.
- IsReady: Boolean set to TRUE when the pipe block is ready.





