 Motor
Motor
Overview
The Motor screen is used to set up or confirm the parameters of the motor connected to the drive. In certain cases, based on the feedback type, the motor parameters will automatically be set. The drive will auto-detect feedback devices that are preset with the appropriate feedback and motor parameters when MOTOR.AUTOSET is set to 1 (default). The values the drive uses for commutation, current, and velocity loop gains will be populated automatically.
If your motor does not have a plug and play feedback device![]() A process whereby some proportion of the output signal of a system is passed (fed back) to the input.
In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position, then you must turn off the motor autoset feature as shown in the screenshot below (MOTOR.AUTOSET = 0) and select the appropriate motor from the motor parameter database.
A process whereby some proportion of the output signal of a system is passed (fed back) to the input.
In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position, then you must turn off the motor autoset feature as shown in the screenshot below (MOTOR.AUTOSET = 0) and select the appropriate motor from the motor parameter database.
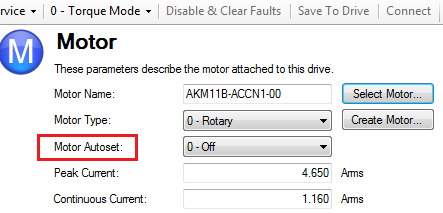
All of the appropriate Kollmorgen motors compatible with the AKD drive are contained in the motor database. For motors that are not listed, click Select Motor to open a custom motor view in which you can input the appropriate motor parameters.
Motor Setup
When motor autoset is on (MOTOR.AUTOSET = 1), the AKD will automatically configure motor parameters from the data stored in a supported feedback device (Kollmorgen motors with SFD, EnDat, BiSS![]() "Bi-directional Serial Synchronous interface"
An open-source communication protocol for feedback devices. With BiSS, all of the computation for interpolation in regard to position occurs on the ASIC directly in the encoder , HIPERFACE and HIPERFACE DSL). If your motor is detected automatically, the parameters in the Motor view are shaded and not accessible. If you have a non-plug and play standard device (such as an incremental encoder or resolver), you can use this screen to enter the standard AKM, Cartridge motor, DDR, or DDL motor. Other motors can be configured from the Selecting a Motor screen.
"Bi-directional Serial Synchronous interface"
An open-source communication protocol for feedback devices. With BiSS, all of the computation for interpolation in regard to position occurs on the ASIC directly in the encoder , HIPERFACE and HIPERFACE DSL). If your motor is detected automatically, the parameters in the Motor view are shaded and not accessible. If you have a non-plug and play standard device (such as an incremental encoder or resolver), you can use this screen to enter the standard AKM, Cartridge motor, DDR, or DDL motor. Other motors can be configured from the Selecting a Motor screen.
Using the Motor View
The Motor view displays parameters related to the specific motor attached to the drive as follows:
- Motor Name: The motor part number read from the autoset device, or the name from the motor database. When entering a custom motor name, the motor name should not contain any spaces.
- Motor Type: This field allows you to select the proper parameters for a rotary motor or a linear motor (linear motors are a future feature).
- Field Weakening: This field allows a surface permanent magnet motor (MOTOR.TYPE = 0) to operate as an interior permanent magnet motor (MOTOR.TYPE = 6). This field can only be set when MOTOR.TYPE = 0.
- Motor Autoset: This setting to allows the drive to automatically set up a plug and play motor (MOTOR.AUTOSET = 1). With Motor Autoset turned off (MOTOR.AUTOSET = 0), you can access the motor database to select a catalog or custom motor.
The next set of parameters displayed are specific to the electrical and mechanical characteristics of the motor connected to the AKD drive.
- Continuous Current: Motor continuous current rating in Amps rms (MOTOR.ICONT ).
- Peak Current: Motor peak current rating in Amps rms (MOTOR.IPEAK ).
- Coil Thermal Constant: Motor coil thermal time constant in mHz (MOTOR.CTF0).
- Inductance (quad, H): Motor rated inductance in milliHenries (MOTOR.LQLL ).
- Inductance (direct, H): Motor line to line direct axis inductance (MOTOR.LDLL). Only visible for MOTOR.TYPE = 6, Rotary Interior Permanent Magnet.
- Inductance Saturation: Motor quadrature axis inductance saturation characteristic (MOTOR.LISAT). Only visible for MOTOR.TYPE = 6, Rotary Interior Permanent Magnet.
- Motor Poles: Number of motor poles (MOTOR.POLES ).
- Motor Phase: Motor phase offset used to set motor commutation as required. For most devices this is set to 0 (MOTOR.PHASE ).
- Inertia: Motor rotor inertia in Kg-cm^2 (MOTOR.INERTIA ).
- Torque
 Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist Constant: Motor torqueTorque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist contant in Nm/Arms (MOTOR.KT
).
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist Constant: Motor torqueTorque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist contant in Nm/Arms (MOTOR.KT
). - EMF Constant: Defines how much voltage is generated at the motors coils (MOTOR.KE ).
- Motor Resistance: Motor winding resistance in Ohms (MOTOR.R ).
- Maximum Voltage:Motor maximum rated voltage in Vrmsrms stands for root mean square (also known as the quadratic mean) (MOTOR.VOLTMAX
).
- Maximum Speed: Motor maximum rated speed (MOTOR.VMAX ).
Selecting a Motor
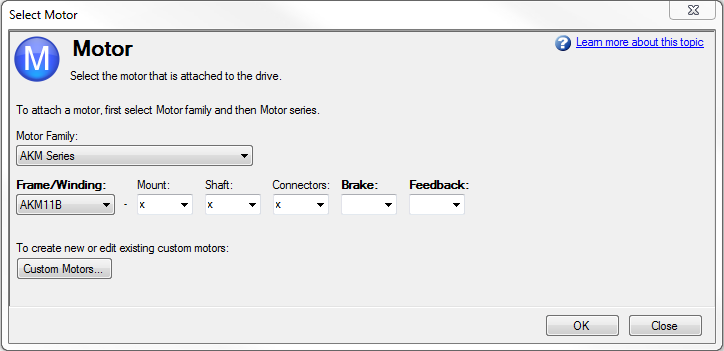
The Select Motor button opens a screen in which you can configure a non-plug and play motor or custom motor.
When this screen is opened, KAS IDE![]() "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger displays by default the motor matched to the current motor name attached to the drive. KAS IDE searches matching motor as follows:
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger displays by default the motor matched to the current motor name attached to the drive. KAS IDE searches matching motor as follows:
- KAS IDE first checks the motor name with custom motors for a match.
- If a match is not found, then KAS IDE checks the name with the standard motors database for a match.
- If a match is not found, then an AKM motor is selected.
For non-plug and play motors, a database of catalog motors is available based on the different Kollmorgen motor families. When you select a motor family, a part number is displayed according to the selected motor family. You can change the part number as needed, and the complete motor name will be displayed according to your selection. This complete motor name is sent to drive. The portions of the part number labeled in bold are required values.
Configuring Custom Motors
From the Select Motor screen, click on Custom Motor to create and edit custom motors in the following screen:

In this view, you can import or export a motor parameter file, or create a custom motor of your choice. The appropriate parameters must be chosen as listed. Several of the parameters allow you to select an alternate unit of measure. When building a custom motor file, do not use blank spaces in the name you choose. Once you have configured one or more custom motors, if you select a custom motor from the list and click OK, then the selected custom motor will be displayed in the Select Motor screen.
The actions available in the custom motor screen include:
- New. Allows you to start a new custom motor (with default values) or load a catalog motor you may want to modify.
- Duplicate. Makes a copy of the highlighted motor in the custom motor list.
- Delete. Deletes the highlighted motor in the customer motor list.
- Import. Allows you to import a motor file (*.motor) from another location
- Export. Allows you to save the highlighted motor file (*.motor) to another location
- Apply. Accepts the values you have entered for the specific motor files you are entering.
- OK. Returns you to the Motor Selection screen.
When entering any of the motor data, be certain the units are correct. The AKD drive uses the motor parameters to set up the various feedback loops and limits associated with the motor selected.
Note that if you select a custom motor from the list and click OK, then that selected custom motor will be displayed in the Select Motor screen.
See also Non-Plug and Play Feedback Devices.
Validating Motor Parameters
When you click OK in the Select Motor screen, KAS IDE validates the range with the drive. If any error is found, an error screen is displayed. Click Continue to set the motor parameters in the drive. Click Cancel to close this screen.
If errors occur while setting the motor parameters, an error screen indicates which parameters require additional attention.
Motor Derating
Motor derating occurs while using a motor in the AKM or VLM series. If a brake is selected or a feedback type other than Resolver is selected, the continuous current will be derated.
Resolver with no brake (no derate):

SFD with no brake (derated):

 Motor Temperature
Motor Temperature
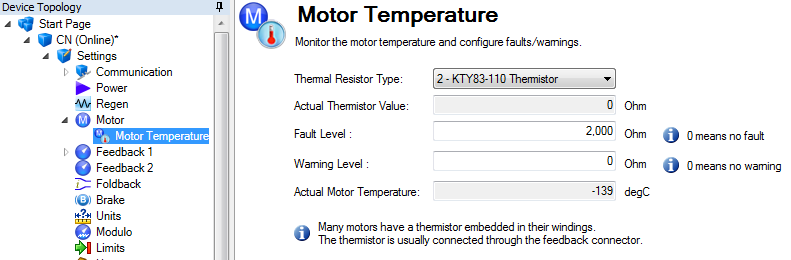
The motor temperature settings are located in the nested motor temperature view. If your motor has thermistor with linear characteristics (MOTOR.RTYPE = 2, 3, or 4), the Actual Motor Temperature field will display the value of MOTOR.TEMPC. For other values of MOTOR.RTYPE this field will be hidden.
Related Parameters







