Axis
Purpose
- Models the link from the Pipe Network to a physical axis.
- Gives access (through the fieldbus) to remote drive's functions and parameters.
- Automatically updates the image of the remote drive's status and error information.
Parameters
|
Parameter |
Description |
|---|---|
|
Acceleration |
|
|
Deceleration |
|
|
Use Axis-specified User Units on Drive |
|
|
Modulo |
The available modes are Modulo (TRUE) and No Modulo (FALSE). Depending on the type of the moving object the axis acts on, you can define the MODULO_POSITION parameter or not.
Figure 1: Mode - Modulo No Modulo
Figure 2: Mode - No Modulo |
|
ModuloPosition |
|
|
Speed / Travel Speed |
|
|
UserUnitsPerRev / |
To divide the current axis into graduations adapted to your project, you must define the unit that is equivalent to one revolution of the physical motor (e.g., 3600 means that you define the user unit to be tenth of a degree). You can rely on expressions to define values. Example with Expressions Gear factor 1:3 and 1000.0 User Units per one gear shaft revolution. // user units per revolution calculation example
Figure 3: Define Value with Expressions See Use the Defines List. |
|
FeedbackUnitsPerRev |
|
|
InitialPosition |
Initial position value expressed in user logical units.
|
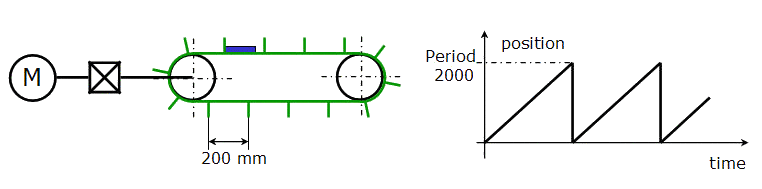
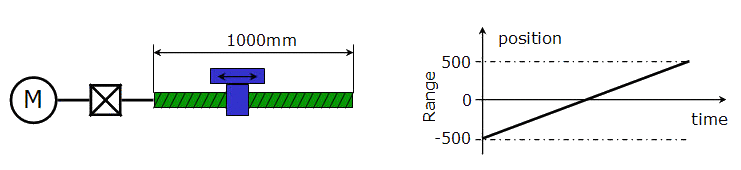
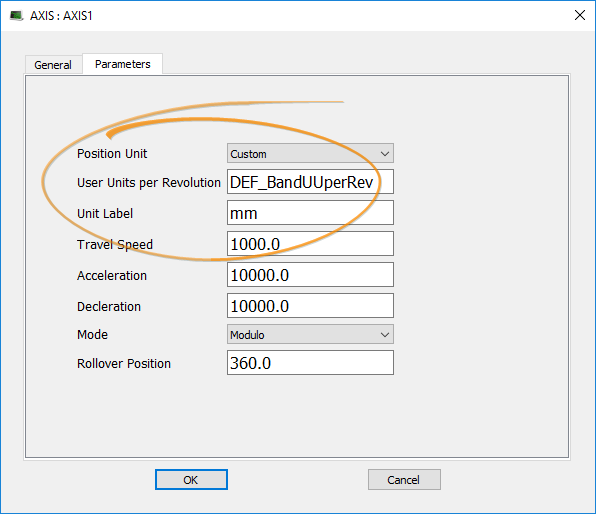
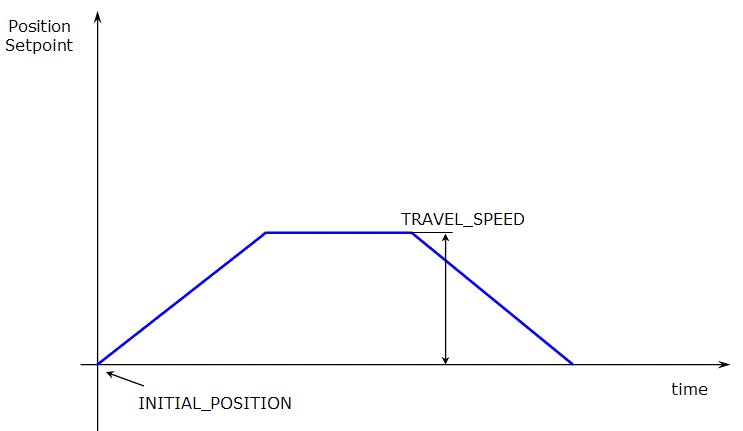
Figure 4: Axis Parameters: INITIAL_POSITION and TRAVEL_SPEED
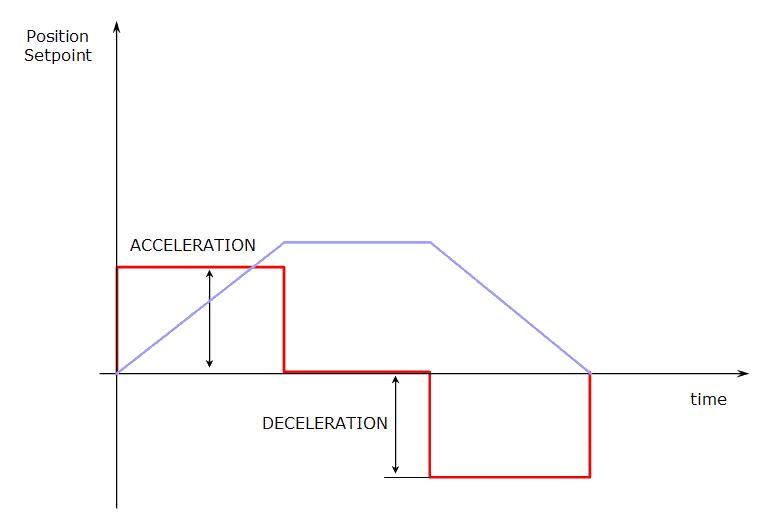
Figure 5: Axis Parameters: ACCELERATION and DECELERATION
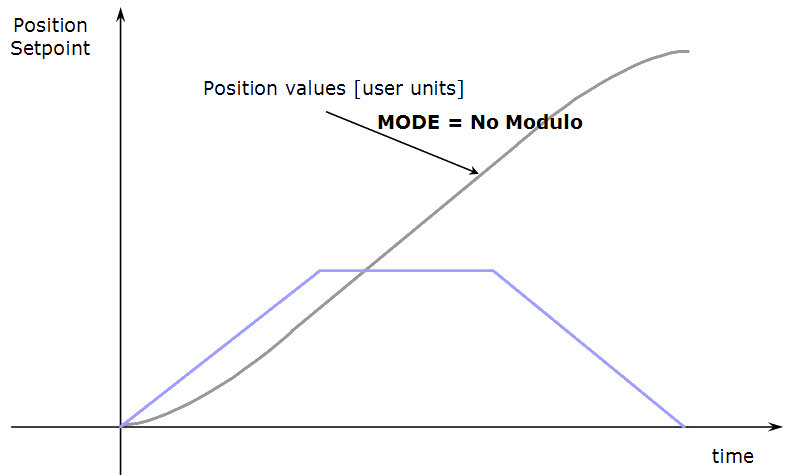
Figure 6: Axis Parameters: MODE No Modulo
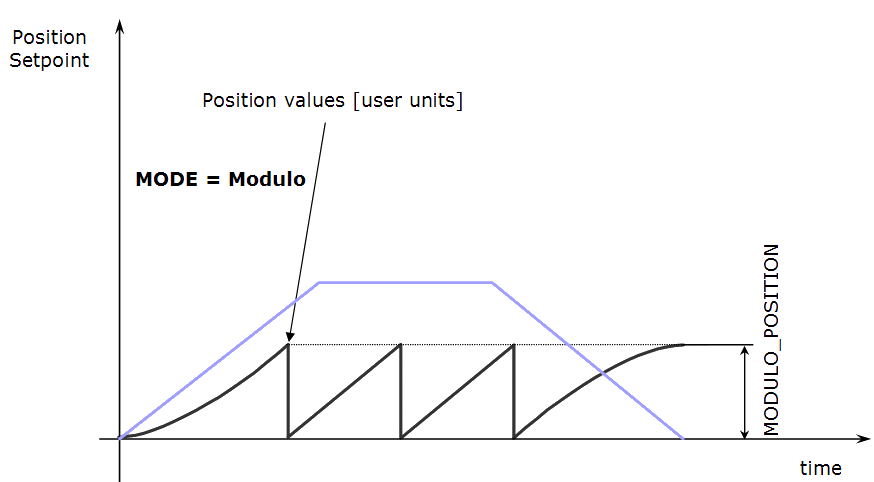
Figure 7: Axis Parameters: MODE Modulo and MODULO_POSITION
Associated Data on Positions
This data are illustrated here:
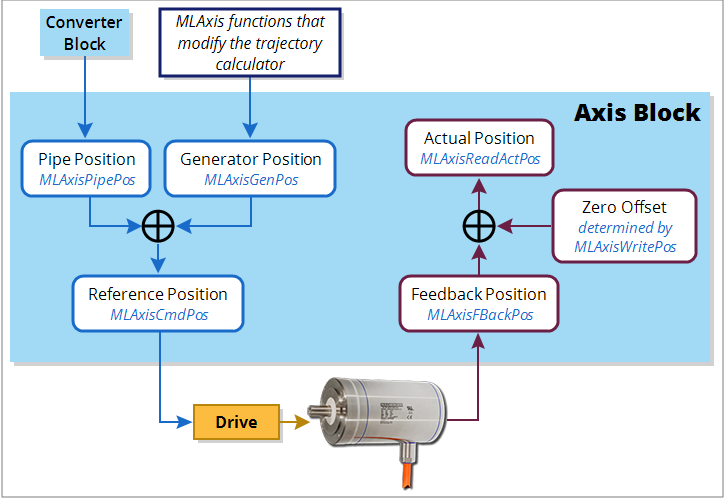
Figure 8: Axis Block Positions Diagram
-
-
All positions are in user units with modulo applied if active, unless specified.
|
Position / Offset |
Description |
|---|---|
|
This is the actual position of the underlying axis as reported by the drive.
ActualPos := FeedbackPos + ZeroOffset |
|
|
|
|
This is the summation of all previous commands (i.e., calls to functions which perform motion) to the Axis internal motion generator. See either such as MLAxisAbs, MLAxisMoveVel, or MLAxisRel.
|
|
|
|
|
|
|
This adjusts the coordinate system so the Actual Position reports correct values after homing or using MLAxisWritePos. |





